Repetitive sliding mode observer for disturbance estimation of a linear motor system
LI Fang, YE Peiqing, YAN Leyang, ZHANG Hui
Beijing Key Laboratory of Precision/Ultra-Precision Manufacturing Equipments and Control, State Key Laboratory of Tribology, Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China
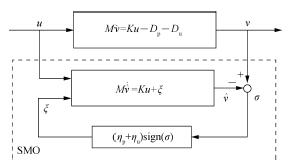
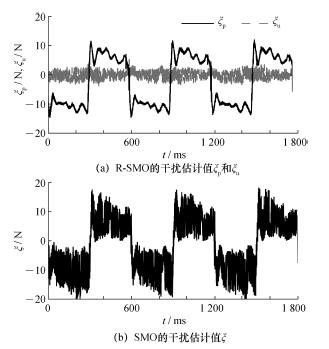
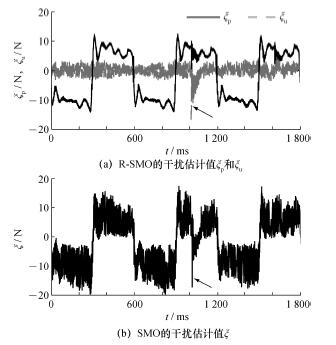
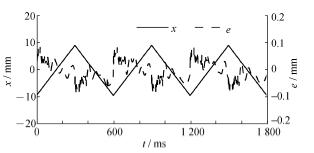
Abstract:The drawback of the conventional sliding mode observer (SMO) when used for disturbance estimation is that it leads to nonzero estimation errors for a time-varying disturbance and chattering. A repetitive SMO (R-SMO) is developed for a repetitive linear motor system where periodic and non-periodic disturbances exist at the same time, which overcomes the drawback of the conventional SMO. The R-SMO incorporates the internal mode of the periodic disturbance to achieve asymptotic convergence to the periodic disturbance. The switching term then only needs to estimate the non-periodic disturbance which significantly reduces the chattering. The R-SMO is shown to be asymptotically convergent. Tests show that the R-SMO well estimates the disturbances of a linear motor system, improves the tracking accuracy after feedforward compensation and is superior to the conventional SMO in terms of convergence accuracy and chattering. Extensions to systems with multiple periodic disturbances and non-repetitive systems are discussed.
李方, 叶佩青, 严乐阳, 张辉. 基于重复滑模观测器的直线电机系统干扰估计[J]. 清华大学学报(自然科学版), 2016, 56(6): 626-632.
LI Fang, YE Peiqing, YAN Leyang, ZHANG Hui. Repetitive sliding mode observer for disturbance estimation of a linear motor system. Journal of Tsinghua University(Science and Technology), 2016, 56(6): 626-632.
[1] Lin C, Yau H, Tian Y. Identification and compensation of nonlinear friction characteristics and precision control for a linear motor stage [J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(4): 1385-1396.
[2] 李庆雷, 王先逵, 吴丹, 等. 永磁同步直线电机推力波动分析及改善措施 [J]. 清华大学学报: 自然科学版, 2000, 40(5): 33-36.LI Qinglei, WANG Xiankui, WU Dan, et al. Thrust fluctuation analysis and reduction of PMSLM [J]. Journal of Tsinghua University: Science and Technology, 2000, 40(5): 33-36. (in Chinese)
[3] Fujita T, Matsubara A, Yamazaki K. Experimental characterization of disturbance force in a linear drive system with high-precision rolling guideways [J]. International Journal of Machine Tools and Manufacture, 2011, 51(2): 104-111.
[4] Van Den Braembussche P, Swevers J, Van Brussel H, et al. Accurate tracking control of linear synchronous motor machine tool axes [J]. Mechatronics, 1996, 6(5): 507-521.
[5] LU Shaowu, TANG Xiaoqi, SONG Bao, et al. Identification and compensation of force ripple in PMSLM using a JITL technique [J]. Asian Journal of Control, 2015, 17(5): 1559-1568.
[6] Tan K K, Huang S N, Lee T H. Robust adaptive numerical compensation for friction and force ripple in permanent-magnet linear motors [J]. IEEE Transactions on Magnetics, 2002, 38(1): 221-228.
[7] Yu S, Mishra S, Tomizuka M. On-line force ripple identification and compensation in precision positioning of wafer stages [C]// ASME 2007 International Mechanical Engineering Congress and Exposition. New York, NY, USA: ASME, 2008: 645-650.
[8] Chen S, Tan K K, Huang S, et al. Modeling and compensation of ripples and friction in permanent-magnet linear motor using a hysteretic relay [J]. IEEE/ASME Transactions on Mechatronics, 2010, 13(4): 586-594.
[9] Wu W C, Liu T S. Sliding mode based learning control for track-following in hard disk drives [J]. Mechatronics, 2004, 14(8): 861-876.
[10] Vinodh K E, Jerome J, Ayyappan S. Comparison of four state observer design algorithms for MIMO system [J]. Archives of Control Sciences, 2013, 23(2): 243-256.
[11] 高为炳. 变结构控制的理论及方法 [M]. 北京: 科学出版社, 1996.GAO Weibing. Variable Structure Control Theory and Design Approach [M]. Beijing: Science Press, 1996. (in Chinese)
[12] Utkin V I, Guldner J, Shi J. Sliding Mode Control in Electromechanical Systems [M]. London, UK: Taylor & Francis, 1999.
[13] Feng Y, Yu X, Han F. High-order terminal sliding-mode observer for parameter estimation of a permanent-magnet synchronous motor [J]. IEEE Transactions of Industrial Electronics, 2013, 60(10): 4272-4280.
[14] Davila J, Fridman L, Poznyak A. Observation and identification of mechanical systems via second order sliding modes [J]. International Journal of Control, 2006, 79(10): 1251-1262.
[15] Lu Y S. Sliding-disturbance observer with switching-gain adaptation and its application to optical disk drives [J]. IEEE Transactions on Industrial Electronics, 2009, 56(9): 3743-3750.
[16] Lu Y S, Li Y T. Design of a sliding perturbation estimator with bound estimation [C]// 10th International Workshop on Variable Structure Systems. Piscataway, NJ, USA: IEEE Press, 2008: 308-313.
[17] Francis B, Wonham W. The internal model principle of control theory [J]. Automatica, 1976, 12(5): 457-465.
[18] Wang Y, Gao F, Doyle F J. Survey on iterative learning control, repetitive control, and run-to-run control [J]. Journal of Process Control, 2009, 19(10): 1589-1600.
[19] LI Fang, YE Peiqing, ZHANG Hui. An improved learning variable structure control method for multi-periodic disturbances rejection [C]// 2015 International Workshop on Recent Advances in Sliding Modes (RASM). Piscataway, NJ, USA: IEEE Press, 2015: 1-4.
 2016, Vol. 56
2016, Vol. 56