Multi-constraint compound reentry guidance based on onboard model identification
CHENG Lin1, ZHANG Qingzhen2, JIANG Fanghua1
1. School of Aerospace Engineering, Tsinghua University, Beijing 100084, China; 2. School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China
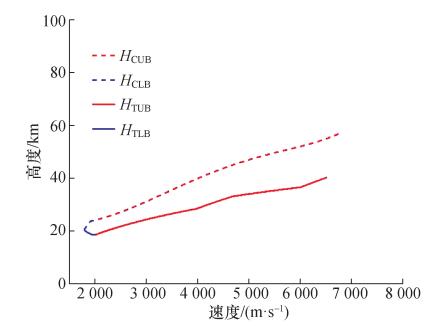
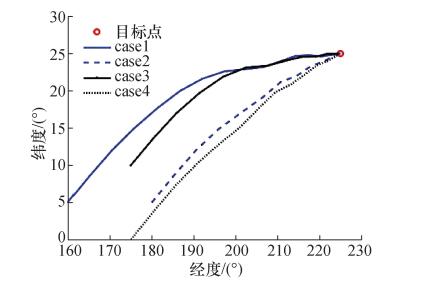
Abstract:A period-crossing feasible trajectory planning algorithm for reentry guidance was developed based on control variable parameterization, integral transformations, and onboard model identification. A compound height velocity (HV) corridor simplifies the reentry guidance problem into a root-searching problem. A Gauss integral is introduced to improve the time efficiency of the range prediction with the original integral problem converted into a function calculation problem. The recursive least squares estimation method was used to develop functions for on-board information mining and model identification. The reliable, explicit solution model can easily correct the weight coefficients using the period-crossing Newton-Raphson method. Numerical simulations show that the reentry guidance method based on on-board model identification is much faster, more autonomous and more adaptable than the reference trajectory tracking design method.
[1] HARPOLD J C, GRAVES JR C A. Shuttle entry guidance[C]//Proceedings of the 25th American Astronautical Society, Anniversary Conference. Houston, USA:NASA, 1978:35-40. [2] HANSON J. Advanced guidance and control project for reusable launch vehicles[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit. Dever, USA:AIAA, 2000:1-10. [3] MEASE K D, CHEN D T, TEUFEL P, et al. Reduced-order entry trajectory planning for acceleration guidance[J]. Journal of Guidance, Control, and Dynamics, 2002, 25(2):257-266. [4] KANG Y L, CHENG L, ZHANG Q Z, et al. Data-driven RLV multi-objective reentry trajectory optimization based on new QABC algorithm[J]. The International Journal of Advanced Manufacturing Technology, 2016, 84(1-4):453-471. [5] FAHROO F, ROSS I M. Direct trajectory optimization by a Chebyshev pseudospectral method[J]. Journal of Guidance, Control, and Dynamics, 2002, 25(1):160-166. [6] BOLLINO K P, LEWIS L R, SEKHAVAT P, et al. Pseudospectral optimal control:a clear road for autonomous intelligent path planning[C]//Proceedings of the AIAA InfoTech at Aerospace Conference and Exhibit. Rohnert Park, USA:AIAA, 2007:1228-1241. [7] REA J R. A Legendre pseudospectral method for rapid optimization of launch vehicle trajectories[D]. Cambridge:Massachusetts Institute of Technology, 2001. [8] LU P. Entry guidance:a unified method[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(3):713-728. [9] SHEN Z J, LU P. Onboard generation of three-dimensional constrained entry trajectories[J]. Journal of Guidance, control, and Dynamics, 2003, 26(1):111-121. [10] 赵頔, 沈作军. 基于在线轨迹迭代的自适应再入制导[J]. 北京航空航天大学学报, 2016, 42(7):1526-1535.ZHAO D, SHEN Z J. Adaptive reentry guidance based on on-board trajectory iterations[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(7):1526-1535. (in Chinese) [11] ROSS I M, SEKHAVAT P, FLEMING A, et al. Pseudospectral feedback control:Foundations, examples and experimental results[C]//Proceedings of the 2006 AIAA Guidance, Navigation, and Control Conference. Keystone, USA:AIAA, 2006:78-99. [12] LU P. Entry guidance and trajectory control for reusable launch vehicle[J]. Journal of Guidance, Control, and Dynamics, 1997, 20(1):143-149. [13] LU P, HANSON J M. Entry guidance for the X-33 vehicle[J]. Journal of Spacecraft and Rockets, 1998, 35(3):342-349. [14] LU P, BRUNNER C W, STACHOWIAK S J, et al. Verification of a fully numerical entry guidance algorithm[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(2):230-247. [15] 雍恩米. 高超声速滑翔式再入飞行器轨迹优化与制导方法研究[D]. 长沙:国防科学技术大学, 2008:3-6.YONG E M. Study on trajectory optimization and guidance approach for hypersonic glide-reentry vehicle[D]. Changsha:National University of Defense Technology, 2008:3-6. (in Chinese) [16] FAHROO F, DOMAN D B, NGO A D. Footprint generation for reusable launch vehicles using a direct pseudospectral method[C]//Proceedings of the 2003 American Control Conference. Denver, USA:IEEE, 2003:2163-2168. [17] LU P. Closed-form control laws for linear time-varying systems[J]. IEEE Transactions on Automatic Control, 2000, 45(3):537-542. [18] JORRIS T R, MCCRACKEN B. Aircraft system identification using pseudospectral parameter optimization with adaptive nodes[C]//Proceedings of AIAA Atmospheric Flight Mechanics Conference. Portland, USA:AIAA, 2011:178-201. [19] BITTNER M, FISCH F, HOLZAPFEL F, et al. A multi-model Gauss pseudospectral optimization method for aircraft trajectories[C]//Proceedings of AIAA Atmospheric Flight Mechanics Conference. Minneapolis, USA:AIAA, 2012:329-340. [20] TAYLOR C P. Optimization study of a trans-Atlantic abort for the U.S. space shuttle using a pseudospectral Legendre method[D]. Cambridge:Massachusetts Institute of Technology, 2003. [21] STANTON S A. Optimal orbital transfer using a Legendre pseudospectral method[D]. Cambridge:Massachusetts Institute of Technology, 2003. [22] CHENG L, WANG Z B, CHENG Y, et al. Multi-constrained predictor-corrector reentry guidance for hypersonic vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part G:Journal of Aerospace Engineering, 2018, 232(16):3049-3067. [23] PHILLIPS T H. A Common Aero Vehicle (CAV) model, description, and employment guide[R]. Schafer Corporation for AFRL and AF-SPC, 2003.
 2019, Vol. 59
2019, Vol. 59