1. Key Laboratory for Advanced Materials Processing Technology of Ministry of Education, Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China
2. Yangtze Delta Region Institute of Tsinghua University, Jiaxing 314006, China
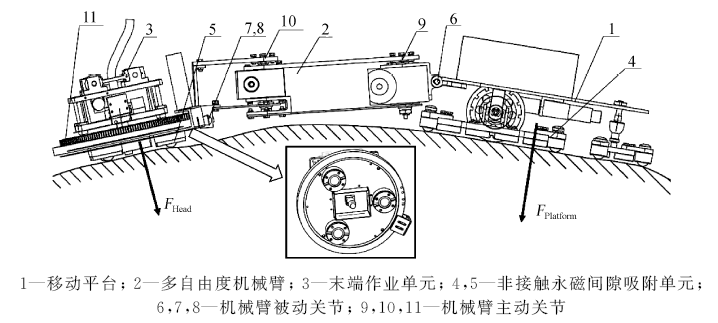
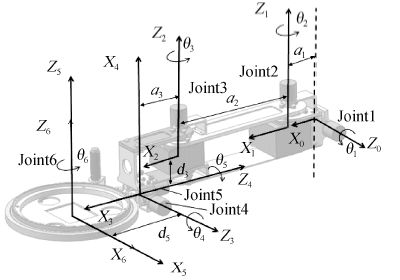
A wall climbing robot with both ends using magnetic adsorption is developed for on-site hydraulic turbine blade repairs. The magnetic mobile platform has a multiple degrees of freedom (DOF) manipulator and an end operating unit. The manipulator has 3 active and 3 passive joints, so the trajectory planning method for a given working path assumes a local curve where the end effector of the manipulator works on a plane. However, simulations for a sphere with a 1.5 m curvature show that the path error due to this assumption is larger than 5 mm. A correction algorithm to reduce the error transforms the error from Cartesian space to the joint space through a Jacobian matrix. Simulations show that the error can be reduced to less than 1 mm by this algorithm.
桂仲成, 陈强, 孙振国, 等. 爬壁机器人的轮式移动机构的转向功耗[J]. 清华大学学报: 自然科学版, 2008, 48(2): 161-164. GUI Zhongcheng, CHEN Qiang, SUN Zhenguo, et al.Turning power losses in the wheeled locomotion mechanism for a wall climbing robot[J]. J Tsinghua Univ: Sci and Tech, 2008, 48(2): 161-164. (in Chinese)
[2]
徐佳, 孙振国, 陈强, 等. 水轮机叶片坑内修焊轮式移动机器人定位算法[J]. 清华大学学报: 自然科学版, 2008, 48(2): 171-165. XU Jia, SUN Zhenguo, CHEN Qiang, et al.Localization algorithm for wheeled mobile robot for on-site repair of hydraulic turbine blades[J]. J Tsinghua Univ: Sci and Tech, 2008, 48(2): 171-165. (in Chinese)〖WX)〗
[3]
马献德, 陈强, 孙振国, 等. 水轮机叶片坑内修复机器人姿态估计改进算法[J]. 清华大学学报: 自然科学版, 2011, 51(5): 697-701. MA Xiande, CHEN Qiang, SUN Zhenguo, et al.Improved pose estimation algorithm for an on-site turbine blade repair robot[J]. J Tsinghua Univ: Sci and Tech, 2011, 51(5): 697-701. (in Chinese)
[4]
项康泰, 孙振国, 戴红军, 等. 水轮机叶片修焊机器人控制系统研究 [C]// 第15次全国焊接学术会议论文集. 西宁, 2010. XIANG Kangtai, SUN Zhenguo, DAI Hongjun, et al. Research of control system of turbine blade repairing robot [C]// Proc 15th National Welding Conf. Xining, China, 2010. (in Chinese)
[5]
Hazel B, Cote J, Laroche Y, et al.A portable, multiprocess, track-based robot for in situ work on hydropower equipment[J]. Journal of Field Robotics, 2012, 29(1): 69-101.
[6]
Lessard J, Bigras P, Liu Z, et al.Characterization, modeling and vibration control of a flexible joint for a robotic system[J]. Journal of Vibration and Control, 2014, 20(6): 943-960.
[7]
桂仲成. 水轮机叶片坑内修复用爬壁机器人研究 [D]. 北京: 清华大学, 2006. GUI Zhongcheng. Study on Wall Climbing Robot for Hydraulic Turbine Blade On-Site Repair [D]. Beijing: Tsinghua University, 2006. (in Chinese)
[8]
马献德. 水轮机叶片修复机器人自主定位研究 [D]. 北京: 清华大学, 2011. MA Xiande. Research on the Self Localization of Mobile Robot for Hydraulic Turbine Blade On-Site Repair [D]. Beijing: Tsinghua University, 2011. (in Chinese)
[9]
Peiper D L. The Kinematics of Manipulators under Computer Control [R]. Stanford, CA, USA: Stanford University, 1968.
[10]
Jazar R N. Theory of Applied Robotics: Kinematics, Dynamics, and Control[M]. Berlin, Germany: Springer, 2007.
[11]
Manocha D, Canny J F. Efficient inverse kinematics for general 6R manipulators[J]. IEEE Transactions on Robotics and Automation, 1994, 10(5): 648-657.
[12]
孙立宁, 任子武, 王振华. 基于混合类电磁机制算法的机械臂逆运动学解[J]. 机械工程学报, 2012(17): 21-28. SUN Lining, REN Ziwu, WANG Zhenhua. Inverse kinematics solution for robot manipulator based on hybrid electromagnetism-like mechanism algorithm[J]. Journal of Mechanical Engineering, 2012(17): 21-28. (in Chinese)
 2014, Vol. 54
2014, Vol. 54  ),张文增1,陈强1,2
),张文增1,陈强1,2