Robust decoupling inner-loop control for a post-stall maneuverable fighter
ZHOU Chijun1,2, ZHU Jihong1, LEI Humin2, YUAN Xiaming1, YIN Hang1
1. Department of Computer Science and Technology, Tsinghua University, Beijing 100084, China;
2. Air and Missile Defense College, Air Force Engineering University, Xi'an 710051, China
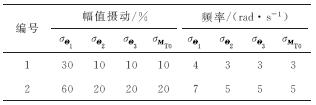
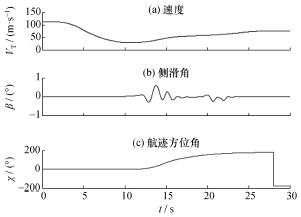
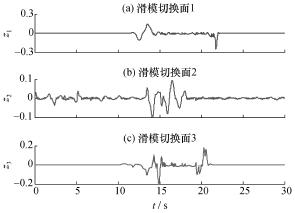
Abstract:A robust decoupling control approach was developed for a strongly nonlinear and strongly coupled inner-loop system for post-stall maneuvers. The control process includes moment compensation, linear controller design and robust compensation. The aerodynamic moment, inertial coupling moment and additional moment caused by the thrust vector are first compensated through querying an aerodynamic database with the damping moment not included. A second-order reference model is then employed to determine the proportional and integral coefficients of the linear controller. A series of aerodynamic moment derivatives and thrust force parameter perturbations are then described by sine functions to get an analytical expression for the model uncertainty and a robust compensator based on the sliding mode control methodology. Simulations show that the energy consumption can be reduced when the aerodynamic damping moment is not included. Moreover, the Herbst maneuver and robust command tracking can be achieved, even with 60% parameter perturbations in the aerodynamic derivatives and 20% perturbations with the control derivatives.
[1] 比施根斯 Γ C. 超声速飞机空气动力学和飞行力学[M]. 上海:上海交通大学出版社, 2009.Besgas Γ C. Aerodynamics and Flight Dynamics for Supersonic Aircraft[M]. Shanghai:Shanghai Jiaotong University Press, 2009.(in Chinese)
[2] Xin M. Unified nonlinear optimal flight control and state estimation of highly maneuverable aircraft[J]. Aerospace Science and Technology, 2014, 37:70-80.
[3] Alcorn C W. The X-31 aircraft:Advances in aircraft agility and performance[J]. Progress in Aerospace Sciences, 1996, 32(4):377-413.
[4] Walker G, Steven S, Fuller J. F-35B integrated flight- propulsion control development[C]//International Powered Lift Conference. Los Angeles, CA, USA:AIAA Press, 2013, 4243.
[5] Atesoglu Ö, Özgören M K. Automated maneuvering control of a conventional tactical aircraft enhanced with thrust vectoring controls[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Portland, OR, USA:AIAA Press, 2011, 6636.
[6] Kolesnikov E. NDI-based flight control law design[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. San Francisco, CA, USA:AIAA Press, 2005, 5977.
[7] Burken J J, Williams-Hayes P, Kaneshige J T, et al. Adaptive control using neural network augmentation for a modified F-15 aircraft[C]//IEEE Mediterranean Conference on Control and Automation. Ancona, Italy:IEEE Press, 2006:1-6.
[8] Sieberling S, Chu Q P, Mulder J A. Robust flight control using incremental nonlinear dynamic inversion and angular acceleration prediction[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(6):1732-1742.
[9] Walker G P, Allen D A. X-35B STOVL flight control law design and flying qualities[C]//Proceedings of the Biennial International Powered Lift Conference and Exhibit. Williamsburg, VA, USA:AIAA Press, 2002, 6018.
[10] Bosworth J T. Flight results of the NF-15B intelligent flight control system(IFCS) aircraft with adaptation to a longitudinally destabilized plant[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Honolulu, HI, USA:AIAA Press, 2008, 6985.
[11] Bowers A H, Pahle J W, Wilson R J, et al. An overview of the NASA F-18 high alpha research vehicle[R]. Washington DC, USA:NASA, 1996.
[12] Atesoglu Ö, Özgören M K. High-α flight maneuverability enhancement of a twin engine fighter-bomber aircraft for air combat superiority using thrust-vectoring control[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Keystone, SD, USA:AIAA Press, 2006, 6056.
[13] Atesoglu Ö, Özgören M K. Nonlinear robust controller design for high-α maneuvering enhancement of a fighter aircraft with aerodynamic and thrust vectoring controls[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Honolulu, HI, USA:AIAA Press, 2008, 6488.
[14] Sonneveldt L, Chu Q P, Mulder J A. Nonlinear flight control design using constrained adaptive backstepping[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(2):322-336.
[15] 孙增圻.系统分析与控制[M]. 北京:清华大学出版社, 1994.SUN Zengqi. System Analysis and Control[M]. Beijing:Tsinghua University Press, 1994.(in Chinese)
[16] Mattei G, Monaco S. Nonlinear autopilot design for an asymmetric missile using robust backstepping control[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(5):1462-1476.
[17] HU Qinglei, JIANG Boyan, Friswell M I. Robust saturated finite time output feedback attitude stabilization for rigid spacecraft[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(6):1914-1929.
 2015, Vol. 55
2015, Vol. 55