



2. 北京电动车辆协同创新中心, 北京 100081
2. Collaborative Innovation Centre for Electric Vehicles, Beijing 100081, China
液压式混合动力作为混合动力技术的重要组成部分,在公交车、工程机械等重型车辆传动系统中都得到了广泛应用[1]。液压蓄能器的功率密度比较大,能量释放及回收速度快且能量回收效率高,同时液压系统安全可靠,成本低,节能环保。对于履带推土机而言,采用液压系统可以有效提升系统的燃油经济性[2]。目前的混合动力履带推土机传动系统的研究多集中于全液压式驱动、串联式液压驱动及并联式液压驱动系统的能量管理策略[3-4];而实际生产中多以全液压驱动为主,通常有双泵双马达、单泵双马达等结构模式[5]。卡特彼勒(Caterpillar)公司率先研发并商用了一款D7E串联式履带推土机,其性能相比于传统履带推土机有较大提升,随后D7E的改进方案选择了液压驱动系统[6]。国内的山推、三一重工等公司联合国内的高校开展相关研究,并陆续制造出相应的产品[7]。
相比于全液压或串联式混合动力结构,基于行星传动的混联式混合动力传动系统具有传动效率高、体积小、承载能力强、工作稳定等特点,特别是其可以实现结构紧凑的大功率传动[8]。同时,行星传动可以通过调节发动机的工作点并使其与输出解耦,保证发动机工作在最优工作区域中,实现无级变速功能,提高了系统燃油经济性[9-10]。目前, 对基于行星传动的液压混联式混合动力系统的研究多着眼于乘用车或大功率卡车等轮式车辆[11],其结构设计方式不断更新,动力性不断提升,综合油耗逐渐减小。同时,混联式传动系统的构型方案设计和控制策略也成为研究热点,研究结果表明其可以优化布置空间,提升燃油经济性[12]。
但是,目前对液压混联式传动系统的研究多集中于轮式车辆,对履带工程机械等暂缺少研究。而且,目前的大部分研究都集中于基于行星齿轮传动的单输出混合动力传动系统[13]。对于履带车辆而言,其性能具有诸多特殊性,除需要满足直线行驶的驱动需求外,还需要满足行进中转向甚至中心转向的需求。对于传统动力的履带推土机,其转向通常是依靠布置转向横轴并通过差速转向来实现,系统的布置灵活性较差;而对于现有的全液压或串联式混合动力结构,马达分别驱动两侧履带,转向中需求转矩非常大,容易造成转向半径过大,同时系统传动效率也比较低。
本文提出了一种基于行星齿轮传动的液压混联式结构,其具有双输出,可以分别控制左、右侧履带,同时满足履带推土机的直线行驶及转向性能需求,省去转向横轴,提高转向灵活性和系统整体传动效率。本文首先提出了系统结构设计架构,随后通过自动建模、自动快速筛选得到性能较优的结构类别,最后通过全局动态规划算法选择燃油经济性最好的结构。仿真结果证明了该结构可以在提升系统效率的同时,拥有更强的牵引及转向性能,而且结构更加紧凑,集成化程度更高。
1 基于行星传动的液压混合动力履带推土机传动系统结构为克服现有全液压或液压混合动力履带推土机的缺陷,本文设计基于行星传动的液压履带推土机传动系统。选择约翰迪尔(John Deere)公司型号650K液压履带推土机为对照目标,采用与其相同功率等级部件,实现效率更高、性能更优的结构设计。相应的设计参数如表 1所示。
| 履带推土机 | 运行质量/kg | 9 049 |
| 履带接地长/m | 2.349 | |
| 履带接地宽/m | 1.550 | |
| 末级传动比 | 52.13 | |
| 发动机 | 排量/L | 4.6 |
| 额定转速/(r·min-1) | 1 400 | |
| 额定功率/kW | 78 | |
| 液压泵/马达 | 排量/cm3 | 36.4 |
| 怠速最高流量/L | 80 | |
| 最高转速/(r·min-1) | 3 200 | |
| 最高功率/kW | 54 |
为实现基于行星传动的液压混联式系统,本文选择双向液压泵/马达作为动力元件,相应的性能参数与表 1相同。为使系统具有3个自由度,则需选取3个液压泵/马达以分别调节两侧履带的输出转矩,另外为其他耗能设备如铲刀等提供运行功率。由于单排行星齿轮机构具有3个节点,本文只考虑每个节点只能连接一个部件,即不考虑两个部件共轴的传动模式。若发动机、3个液压泵/马达、两个输出分别与行星齿轮机构的节点连接,则至少需要3排行星齿轮机构,才能使得系统具有3个自由度。本文的设计方案如图 1所示。

|
| 图 1 液压混合动力履带推土机传动系统结构 |
2 系统的构型设计
如果将发动机、3个液压泵/马达、左右两侧履带的输出轴直接与3排行星齿轮结构的9个节点相连,则可能的结构种类众多。除此之外,行星排之间的机械连接约束的种类也比较多,同时也存在未连接部件的节点接地的情况。为选择合适的结构,本文提出了系统的构型设计步骤,如图 2所示。可以通过图 2所示方法在众多候选结构中选择出满足液压式履带推土机性能要求的传动系统构型方案。

|
| 图 2 系统的构型设计步骤 |
首先,通过自动建模的方式建立系统的第一及第二动力学特征矩阵,以直接得到不同结构下部件之间的转速及转矩关系。随后,通过快速自动筛选的方法,筛选出能够同时实现如直线行驶、行进中转向、中心转向、倒退等功能的结构,并对比选择出动力性及转向特性更优的结构。最终,通过动态规划算法找到性能可行结构中经济性较好的结构作为最优结构设计方案。
2.1 自动建模 2.1.1 第一动力学特征矩阵的建立下面以一种候选结构示意图(如图 3所示)为例,说明自动动力学建模的方法。图 3中,S、R、C分别表示太阳轮、齿圈、行星架的位置,其后的数字标号代表行星排序号。

|
| 图 3 一种基于3排行星传动的候选结构 |
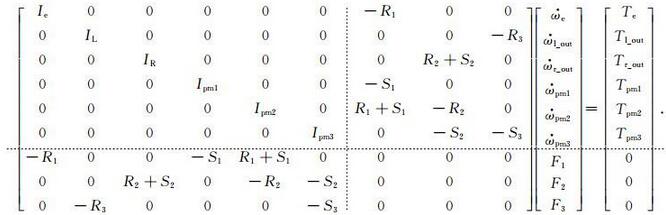
对每个部件所在的节点进行受力分析后,可以得到式(1) 所示的动力学矩阵,
|
(1) |
R1、R2、 R3、S1、S2、S3分别为第1、第2、第3排行星齿轮的内齿圈半径及太阳轮半径;Ie、IL、IR、Ipm分别为发动机、左输出轴、右输出轴及液压泵/马达的转动惯量,由于相比于动力部件的转动惯量,行星排自身的转动惯量较小,因此可忽略不计。
该矩阵可以根据特征进行拆分,按照式(1) 虚线的划分模式,得到式(2) 中简化矩阵关系:
| $ \begin{array}{l} \;\;\;\;\;\left[ {\begin{array}{*{20}{c}} \mathit{\boldsymbol{J}}&\mathit{\boldsymbol{D}}\\ {{\mathit{\boldsymbol{D}}^{\rm{T}}}}&{\bf{0}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\mathit{\boldsymbol{ \boldsymbol{\dot \varOmega} }}}\\ \mathit{\boldsymbol{F}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} \mathit{\boldsymbol{T}}\\ {\bf{0}} \end{array}} \right],\\ \mathit{\boldsymbol{D}} = \left[ {\begin{array}{*{20}{c}} {{R_1}}&0&0\\ 0&0&{{R_3}}\\ 0&{{R_2} + {S_2}}&0\\ { - {S_1}}&0&0\\ {{R_1} + {S_1}}&{ - {R_2}}&0\\ 0&{ - {S_2}}&{ - {S_3}} \end{array}} \right]. \end{array} $ | (2) |
其中:
为了便于分析各部件间的转速及转矩关系,需要根据式(2) 中的第一动力学特征矩阵,建立所有部件的角加速度与力矩的关系式(3),其中A*矩阵称为第二动力学特征矩阵,
| $ \left[{\begin{array}{*{20}{c}} {{{\dot \omega }_{\rm{e}}}}\\ {{{\dot \omega }_{{\rm{l\_out}}}}}\\ {{{\dot \omega }_{{\rm{r\_out}}}}}\\ {{{\dot \omega }_{{\rm{pm1}}}}}\\ {{{\dot \omega }_{{\rm{pm2}}}}}\\ {{{\dot \omega }_{{\rm{pm3}}}}} \end{array}} \right] = {\boldsymbol{A}^*}\left[{\begin{array}{*{20}{c}} {{T_{\rm{e}}}}\\ {{T_{{\rm{l\_out}}}}}\\ {{T_{{\rm{r\_out}}}}}\\ {{T_{{\rm{pm1}}}}}\\ {{T_{{\rm{pm2}}}}}\\ {{T_{{\rm{pm3}}}}} \end{array}} \right]. $ | (3) |
根据式(2),若令
| $ {\left[{\begin{array}{*{20}{c}} \mathit{\boldsymbol{J}}&\mathit{\boldsymbol{D}}\\ {{\mathit{\boldsymbol{D}}^{\rm{T}}}}&{\bf{0}} \end{array}} \right]^{ - 1}} = \left[{\begin{array}{*{20}{c}} \mathit{\boldsymbol{A}}&\mathit{\boldsymbol{B}}\\ {{\mathit{\boldsymbol{B}}^{\rm{T}}}}&\mathit{\boldsymbol{C}} \end{array}} \right], $ | (4) |
其中:A、B、C为假定中间变量矩阵,I和0为单位矩阵和零矩阵,则:
| $ \left[{\begin{array}{*{20}{c}} {\mathit{\boldsymbol{ \boldsymbol{\dot \varOmega} }}}\\ \mathit{\boldsymbol{F}} \end{array}} \right]\left[{\begin{array}{*{20}{c}} \mathit{\boldsymbol{A}}&\mathit{\boldsymbol{B}}\\ {{\mathit{\boldsymbol{B}}^{\rm{T}}}}&\mathit{\boldsymbol{C}} \end{array}} \right] = \left[{\begin{array}{*{20}{c}} \mathit{\boldsymbol{T}}\\ {\bf{0}} \end{array}} \right], $ | (5) |
| $ \bf{\dot{\Omega }}=\mathit{\boldsymbol{AT}}, \ \mathit{\boldsymbol{A=}}{{\mathit{\boldsymbol{A}}}^{*}}, $ | (6) |
| $ \left[\begin{matrix} \mathit{\boldsymbol{J}} & \mathit{\boldsymbol{D}} \\ {{\mathit{\boldsymbol{D}}}^{\rm{T}}} & \bf{0} \\ \end{matrix} \right]\left[\begin{matrix} \mathit{\boldsymbol{A}} & \mathit{\boldsymbol{B}} \\ {{\mathit{\boldsymbol{B}}}^{\rm{T}}} & \mathit{\boldsymbol{C}} \\ \end{matrix} \right]=\mathit{\boldsymbol{I}}, $ | (7) |
| $ \mathit{\boldsymbol{B=}}-{{\mathit{\boldsymbol{J}}}^{-\rm{T}}}\mathit{\boldsymbol{D}}{{\mathit{\boldsymbol{C}}}^{\rm{T}}}, $ | (8) |
| $ {{\mathit{\boldsymbol{C}}}^{\rm{T}}}=-{{\left( {{\mathit{\boldsymbol{D}}}^{\rm{T}}}\mathit{\boldsymbol{D}} \right)}^{-1}}{{\mathit{\boldsymbol{D}}}^{\rm{T}}}{{\mathit{\boldsymbol{J}}}^{\rm{T}}}{{\left( \mathit{\boldsymbol{D}}{{\mathit{\boldsymbol{D}}}^{\rm{T}}} \right)}^{-1}}\mathit{\boldsymbol{D}}\rm{.} $ | (9) |
推导出的第二动力学特征矩阵为
| $ {{\mathit{\boldsymbol{A}}}^{*}}=\left[\mathit{\boldsymbol{I}}-{{\mathit{\boldsymbol{J}}}^{-\rm{T}}}\mathit{\boldsymbol{D}}{{\left( {{\mathit{\boldsymbol{D}}}^{\rm{T}}}{{\mathit{\boldsymbol{J}}}^{-1}}\mathit{\boldsymbol{D}} \right)}^{-\rm{T}}}{{\mathit{\boldsymbol{D}}}^{\rm{T}}} \right]{{\mathit{\boldsymbol{J}}}^{-1}}. $ | (10) |
A*为一个6×6的矩阵,该动力学特征矩阵可用于自动判断相应的筛选条件。
2.2 物理可行性筛选通过分析,系统结构的布置方案众多。根据结构布置形式,通过排列组合运算可以得到所有具有3排行星传动结构且连接3液压泵/马达的布置结构方案的总数,
| $ {\rm{A}}_6^3 \cdot {\rm{A}}_6^3 \cdot {\rm{A}}_6^3/3 \cdot 2 + {\rm{A}}_6^3 \cdot {\rm{A}}_6^3 \cdot {\rm{C}}_3^2{\rm{A}}_6^2/2 = 1\;800\;000. $ | (11) |
但在式(11) 中,存在一些结构在几何布置方面并不满足系统的自由度及驱动要求。若在筛选中将其筛除,将大大简化系统工作效率。根据第一动力学特征矩阵判断所有物理可行性条件,剔除物理不可行方案。
可剔除的不可行方案有如下类别:
1) 3个电机构成同一排行星齿轮;
2) 两个输出在同一排行星齿轮,剩余节点与发动机或制动器相连(两侧转速相互耦合,无法实现独立控制);
3) 发动机与其中一个输出在同一排行星齿轮中,且该排余下节点与制动器相连(输出转速与发动机转速相互耦合);
4) 不可缺少任意一个系统部件。
对所有的布置方案写出其D矩阵后,可通过矩阵分析去除以上不满足物理可行性条件的结构。
2.3 系统特性可行性筛选下面需要针对履带式车辆的特性进行可行性筛选。对于履带式车辆,根据不同的设计要求,其结构类型需要满足以下3项特性要求中的部分或全部:1) 两侧履带的精确独立控制及行进中转向的功能;2) 中心转向的功能;3) 倒退的功能。
根据第二动力学特征矩阵,可以得到满足3种系统特性对应的条件如表 2所示。
| 特性 | 条件 |
| 双输出独立控制及转向 | a36*=2, a21*>0, a31*>0 |
| 倒退功能 | a21* < 0, a31* < 0;或a24* < 0, a34* < 0;或a25* < 0, a35* < 0;或a26* < 0, a36* < 0 |
| 中心转向功能 | a21*·a31* < 0;或a24*·a34* < 0;或a25*·a35* < 0;或a26*·a36* < 0 |
表 2中的条件均由第二动力学特征矩阵A*中的元素aij*决定,其下标i为行,j为列。写出所有满足物理可行性条件的结构的第二动力学矩阵,利用表 2即可筛选满足特性要求的结构。
2.4 综合行驶性能可行性筛选未考虑机械设计等其他因素的条件下,在物理可行性及系统特性筛选后,可以得到满足要求的3排行星齿轮结构共计1 260种。由于履带推土机的性能要求更看重在直线行驶中的牵引力以及在行进中转向的能力,接下来的工作是将剩余结构与现行全液压履带推土机的直线行驶及转向性能对比,在1 260种设计方案中筛选出更优的设计。
首先针对全液压履带推土机的发动机及液压泵/马达的特性,分析其对应的直线及转向行驶性能。本文选取履带推土机在不同行驶速度下所能输出的最大牵引力作为直线行驶中的性能评价指标,选取在不同速度下的最小转向半径作为转向性能的评价指标。本方案中,全液压履带推土机的最高速度为11 km/h,可分别将其直线行驶及转向行驶的性能计算出来,以供比较。
根据已经筛选出的1 260种结构的第二动力学特征矩阵,即可得到在不同行驶速度下其最优的转向及直线行驶的性能。由于设计中结构并非完全对称,在计算转向半径时,取两侧转向时对应最大的转向半径作为评价其转向性能的临界指标。经过对比筛选后,得到25种可行的候选结构设计方案。
2.5 基于动态规划的燃油经济性分析对得到的25种性能较优的设计方案,需要进一步分析其燃油经济性,选择出经济性最优的结构设计。本文选择了实际测量中的履带推土机的典型工况,如图 4所示,包含启动、切土、运土、卸土和巡航工况[7]。运用动态规划方法分析筛选得到的方案与原始方案的燃油经济性,并进行对比,在25种剩余方案中选择经济性更优者作为最终设计方案。

|
| 图 4 履带推土机实际循环工况示意图 |
动态规划算法用于本文中的液压混联式履带推土机时,所涉及的状态量为蓄能器状态(SOC)、发动机转速,控制量为发动机及其中一个液压泵/马达的转矩。价值函数为
| $ J = \sum\limits_{k = 0}^{N - 1} {L\left( {x\left( k \right),u\left( k \right)} \right) + \alpha {{\left( {{\rm{SOC}}\left( N \right) - {\rm{SOC}}\left( 0 \right)} \right)}^2}.} $ | (12) |
其中:L为每个时间步长下的燃油消耗,N为全部循环下的总步长数,x为状态量,u为控制量,α为衡量蓄能器能量消耗的权重系数,SOC(0) 为初始时刻SOC值。
按图 2中步骤分析后,可以得到3种油耗优于原始方案的设计,如图 5所示。

|
| 图 5 最终筛选得到的最优设计方案 |
3 最优结构的仿真结果分析
在图 5的3种最优设计方案中选取最优结构1为例,对其性能作仿真分析与验证。图 6所示为直线行驶时不同速度下的最大牵引力对比。图 7所示为转向行驶时不同速度下的最小转向半径对比。

|
| 图 6 直线行驶性能对比分析 |

|
| 图 7 转向行驶性能对比分析 |
从图 6和7中看出,本文得到的设计方案的直线行驶最大牵引力在不同行驶速度下均大于原始方案,平均提升约22%。此外,本文方案的转向性能也更优,转向半径平均减小约19%,满足设计的要求。
对最优方案及用作对照的液压传动方案作动态规划分析,对照方案的动态规划油耗结果为1.1 L/km,仿真结果如图 8所示。最优方案的动态规划结果为0.98 L/km,仿真结果如图 9所示。

|
| 图 8 对照方案动态规划仿真结果 |

|
| 图 9 最优方案的动态规划仿真结果 |
由此可见,最优方案在燃油经济性方面提高了10%左右。
4 结论本文提出了基于行星齿轮传动的液压混合动力履带推土机传动系统的设计方案,并对最优结构与现有混合动力推土机结构进行了对比仿真。提出了一种基于3排行星齿轮结构、3个液压泵/马达的混联式履带推土机传动系统结构。该结构能够提高系统的综合传动效率,同时可以集成实现履带推土机的直线行驶及转向行驶功能。通过自动动力学建模,自动进行合理筛选确定候选结构,得到比现有结构动力性及经济性均更优的传动系统结构设计方案。仿真结果表明,最终设计的结构方案能够综合提升履带推土机的直驶牵引力、转向性能及综合燃油经济性。
| [1] | Xiao Q, Wang Q, Zhang Y. Control strategies of power system in hybrid hydraulic excavator[J]. Automation in Construction, 2008, 17(4): 361–367. DOI:10.1016/j.autcon.2007.05.014 |
| [2] | Jo D Y, Kwak S, Kim N. Development of fuel-efficient construction equipment [C]//2011 IEEE 8th International Conference on Power Electronics and ECCE Asia (ICPE & ECCE). Jeju, Korea, 2011: 31-37. |
| [3] | 马鹏飞. 全液压推土机液压行驶驱动系统动力学研究[D]. 西安: 长安大学, 2006. MA Pengfei. Dynamics Research of the Hydraulic Bulldozer Driving System [D]. Xi'an: Changan University, 2006. (in Chinese) |
| [4] | ZHAO Yong, ZHOU Lin. Parameter matching theory of hybrid track-type bulldozer power system [C]//World Automation Congress. Puerto Vallarta, Mexico, 2012: 24-28. |
| [5] | Surampudi B, Nedungadi A, Ostrowski G, et al. Design and Control Considerations for a Series Heavy Duty Hybrid Hydraulic Vehicle [R]. SAE Technical Paper 2009-01-2717, 2009. |
| [6] | Meyers R A. Encyclopedia of Sustainability Science and Technology[M]. New York, NY, USA: Springer Science & Business Media, 2012. |
| [7] | 邹渊, 陈晓玲, 李东阁, 等. 串联式混合动力推土机驱动系参数匹配设计[J]. 机械工程学报, 2014, 50(1): 70–75. ZOU Yuan, CHEN Xiaoling, LI Dongge, et al. Parameter matching design and control optimization for series hybrid tracked bulldozer[J]. Journal of Mechanical Engineering, 2014, 50(1): 70–75. (in Chinese) |
| [8] | Liu J, Peng H. Modeling and control of a power-split hybrid vehicle[J]. IEEE Transactions on Control Systems Technology, 2008, 16(6): 1242–1251. DOI:10.1109/TCST.2008.919447 |
| [9] | Cho S, Ahn K, Lee J M. Efficiency of the planetary gear hybrid powertrain[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2006, 220(10): 1445–1454. DOI:10.1243/09544070JAUTO176 |
| [10] | Kahraman A. Planetary gear train dynamics[J]. Journal of Mechanical Design, 1994, 116(3): 713–720. DOI:10.1115/1.2919441 |
| [11] | Li C T, Peng H. Optimal configuration design for hydraulic split hybrid vehicles [C]//Proceedings of the 2010 American Control Conference. Baltimore, MD, USA, 2010: 5812-5817. |
| [12] | Zhuang W, Zhang X, Ding Y, et al. Comparison of multi-mode hybrid powertrains with multiple planetary gears[J]. Applied Energy, 2016, 178: 624–632. DOI:10.1016/j.apenergy.2016.06.111 |
| [13] | Zhang X, Peng H, Sun J. A near-optimal power management strategy for rapid component sizing of multimode power split hybrid vehicles[J]. IEEE Transactions on Control Systems Technology, 2015, 23(2): 609–618. DOI:10.1109/TCST.2014.2335060 |