

车站广场、候机厅、会展中心等人员密集场所中,行人随身携带的充电宝等电子易燃物品或违禁品可能引发安全事故,增加公共安全风险。提早发现此类安全事故初期征兆并尽快处置,可以避免事故的发生、降低事故的危害,安全巡逻员巡检的重要性由此凸显。然而,人员密集会导致安全巡逻员的视野易受遮挡,巡检难度显著增加。合理配置安全巡逻员数量,是及时发现事故征兆、增加疏散时间、提升人员密集场所安全韧性的关键问题。
国内外学者在巡逻路径优化、资源配置、多智能体协同巡逻,以及无人机和巡逻机器人的应用方面进行了大量研究,以提升巡逻效率和响应能力。在巡逻路径优化与资源配置方面,Camachoo-Collados等[1]通过启发式局部搜索算法提高了多片区的巡逻效率;Liberatore等[2]提出禁忌搜索算法,优化了巡逻区域的资源分配;D'Amico等[3]则采用模拟退火算法平衡警察的工作量;Mukhopadhyay等[4]利用双层随机规划模型进一步优化了资源配置。在多智能体协同巡逻研究中,Portugal等[5]提出了最小化空闲时间的巡逻策略;Almeida等[6]设计的认知协调策略通过结合节点空闲时间和智能体距离优化了巡逻任务;赵云涛等[7]开发的分布式巡逻算法在多智能体的动态环境中展现出显著优势。无人机和巡逻机器人已逐渐成为巡逻工作的核心技术,ARMOR系统[8]在机场安保中、PROTECT系统[9]在港口应用中,通过安全博弈优化巡逻路径,提高了巡逻效率;Zhang等[10]研究了分区参数和响应变量之间的关系,生成了更好的巡逻分区方案;Curtin等[11]提出了一种确定空间区域有效巡逻方法;姚森均[12]设计的安防巡逻机器人能够识别不安全行为并优化巡逻路径;张蕊悦等[13]提出的多机器人巡逻模型通过邻居信息交换的协作机制提升了巡逻效率;尹洪玉等[14]提出的固定翼无人机巡逻覆盖协同路径规划方法,能够更加灵活地处理紧急情况;胡兵等[15]基于Robot Operating System对巡逻机器人系统进行设计,使系统定位收敛速度更快,路径规划稳定性更好;黄晓艳等[16]提出的室外巡逻机器人方案有效降低人力成本、提高巡逻指挥时效;白耀文等[17]基于多步长的多机器人分布式巡逻算法的研究则更加适用于机器人数量较多时的巡逻任务;霍耀彦等[18]提出了一种基于节点重要度的分布式巡逻策略。
上述研究有效提升了大范围公共场所、工业设施及边境安保等场景下的巡逻效率和响应能力。然而,人员密集场所因行人聚集度高、视线易被遮挡等现实条件所限,现阶段仍有许多巡逻工作主要依赖人工巡检,面临着事故征兆的及时发现和信息共享方面的挑战。为此,本文研究了在视野遮挡条件下,人员密集场所中安全巡逻员数量配置对事故征兆发现效率的影响,以提升事故早期发现率和场所的安全韧性,为更高效的安全管理提供理论支持。
1 安全巡逻员视野模型
1.1 行人行为规则
在火车站、高铁站等人员密集场所中,由于人群密度大、个体移动缓慢,行人通常专注于个人信息动态,难以及时察觉事故征兆。为研究安全巡逻员数量配置对提升事故征兆发现效率的影响,本文假设巡逻期间行人处于静止状态,且仅安全巡逻员能识别事故征兆。
1.2 安全巡逻员行为规则
实际情况下,为合理分配资源、提高巡检效率,安全巡逻员通常沿预定路线巡逻,以确保重点区域的有效覆盖。然而,这种方式可能在低风险区域形成巡检盲区,且不便于评估不同数量巡逻员的配置效果。为弥补这一缺陷,本文假设巡逻员按弹性碰撞原理生成随机路径[19],从而实现全域覆盖,减少潜在盲区。同时,随机路径设置提升了模型的可比较性,有助于研究不同安全巡逻员数量配置对事故征兆发现效率的影响。在模型中,考虑行人、事发地点及安全巡逻员的空间分布情况,安全巡逻员的状态在每个时间步内动态更新。当事发地点进入安全巡逻员视线范围时,即标记为巡逻员已识别到事故征兆信息。
1.3 安全巡逻员视野遮挡规则
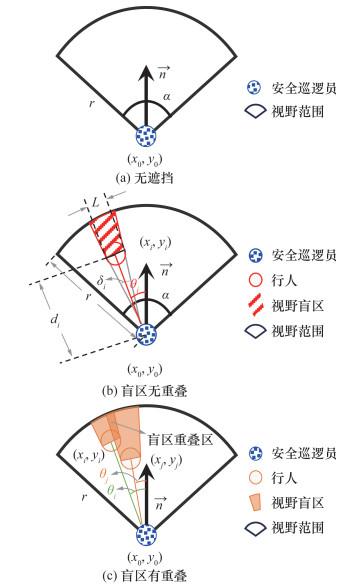
图 1中:$\vec{n}$ 为安全巡逻员行进方向,r为安全巡逻员视野范围半径,α为安全巡逻员视野范围夹角,θi、θj表示行人i、j相对于安全巡逻员行进方向的位置角度,δi表示行人i对安全巡逻员视野的遮挡角度,di表示行人i与安全巡逻员的距离,L表示行人肩宽,(x0, y0)为安全巡逻员的位置坐标,(xi, yi)为行人i的位置坐标。
1) 无遮挡时的视野面积。
无遮挡时安全巡逻员的视野范围如图 1a所示,此时视野面积Sw为
2) 有遮挡时的视野面积。
当di<r且θi < α/2时,即可判定安全巡逻员视野受到行人遮挡。假设安全巡逻员的视野范围内存在n个行人,Sz为遮挡视野面积,遮挡形成的视野盲区可分为无重叠和有重叠两种情况。
(1) 盲区无重叠时的实际视野面积。
视野盲区不重叠时,安全巡逻员实际视野面积Sp为
行人i形成的盲区面积Smi为
di的计算公式为
为便于计算和仿真模拟,本文将行人形成的视野遮挡边界近似处理为以安全巡逻员为圆心的同心圆弧,行人肩宽即为圆弧弦长L,如图 1b所示。δi的计算公式为
(2) 盲区有重叠时的实际视野面积。
当行人i和j对安全巡逻员视野造成遮挡,满足(θi-δi/2)≤(θj+δj/2)且(θj-δj/2)≤(θi+δi/2)时(δi和δj分别表示行人i和j对安全巡逻员视野的遮挡角度),即可判定行人i和j形成的盲区存在重叠,如图 1c所示。针对多人重叠情况,遵循1.1节和1.2节中的规则,两两比较,并结合集合论中的容斥原理进行计算,即可得到该情况下安全巡逻员实际视野面积$S_{\mathrm{p}}^{\prime}$ 的计算公式,
其中行人i和j形成的盲区重叠面积Scij为
盲区重叠角度δcij为
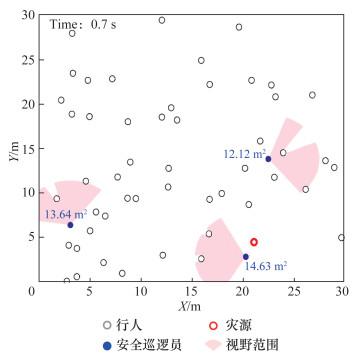
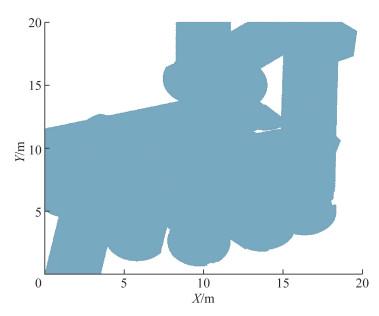
根据计算规则(1)—(8),形成的巡逻员视野范围实时仿真模拟效果,如图 2所示。图中数值为巡逻员的实时视野面积。
2 仿真模拟与结果分析
2.1 实验方案
本文使用MATLAB进行仿真模拟,研究在不同人群规模和空间尺度(房间大小)下,安全巡逻员数量对事故征兆发现时间的影响。仿真模拟流程如图 3所示。
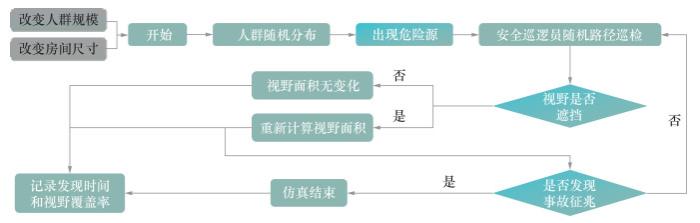
模拟仿真实验工况设置如表 1所示。其中:安全巡逻员视野角度α取120°,视野半径r取2,其他人员肩宽L取0.25。每个工况模拟200次,最后取平均值进行分析。
表 1 模拟仿真实验方案 |
| 工况序号 | 房间尺寸(量纲归一化) | 人群规模/人 | 安全巡逻员数量/人 | 工况序号 | 房间尺寸(量纲归一化) | 人群规模/人 | 安全巡逻员数量/人 | ||||||||||||
| 1 | 20×20 | 50 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 5 | 20×20 | 200 | 1 | 2 | 3 | 4 | 5 | |
| 2 | 100 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 5 | 30×30 | 1 | 2 | 3 | 4 | 5 | |||
| 3 | 200 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 6 | 40×40 | 1 | 2 | 3 | 4 | 5 | |||
| 4 | 400 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 7 | 50×50 | 1 | 2 | 3 | 4 | 5 | |||
2.2 不同人群规模的影响
不同人群规模下,事故征兆发现时间随安全巡逻员数量变化的模拟结果如图 4所示。
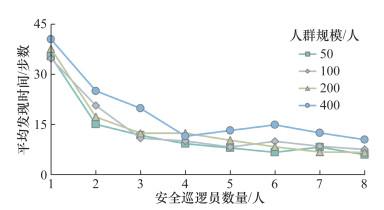
从图 4可以看出,随着房间内人群规模增加,多数情况下,固定数量的安全巡逻员发现事故征兆所需时间会延长。例如,当安全巡逻员为2人、人群规模为50人时,事故征兆发现时间为15步,而人群规模为400人时则延长至25步。这是因为人员密集时,安全巡逻员的视野易受遮挡,增加了发现事故征兆的难度。此外,在相同人群规模下,增加安全巡逻员人数能够缩短发现时间,但这种效果逐渐减弱。例如,人群规模为50人、安全巡逻员从2人增加至4人时,事故征兆平均发现时间从15步减少至9步;而当安全巡逻员从5人增加至8人时,平均发现时间仅从7步减少至6步,缩短幅度显著减小。这是因为在安全巡逻员数量较少时,每新增1人都显著增加了视野覆盖范围,降低了事故征兆发现时间;然而,当视野覆盖范围逐渐趋于饱和,未覆盖区域逐步减少时,新增安全巡逻员对进一步缩短发现时间的边际贡献逐渐减弱。
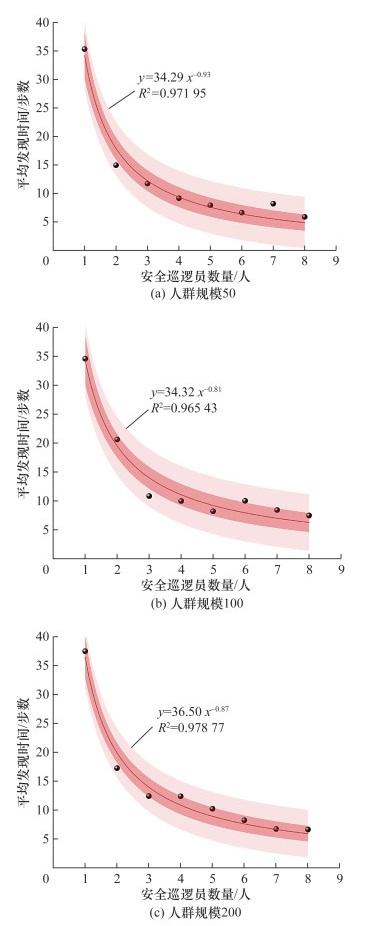
进一步分析发现,事故征兆发现时间与安全巡逻员人数的关系符合不同程度的负幂次递减规律(以人群规模50、100、200人为例,拟合优度R2均超过0.96),如图 5所示。
2.3 不同房间尺寸的影响
不同房间尺寸下,事故征兆发现时间随安全巡逻员数量变化的模拟结果如图 6所示。
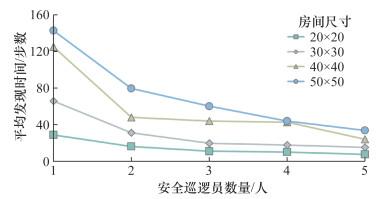
从图 6可以看出,随着房间尺寸的增大,多数情况下,固定数量的安全巡逻员发现事故征兆所需时间显著增加。例如,当安全巡逻员为1人时,20×20房间中的事故征兆平均发现时间为28步,而在50×50房间中则延长至142步。这是由于房间尺寸增大导致了更大的未覆盖区域,从而延长了事故征兆发现时间。此外,在同一房间尺寸下,增加安全巡逻员人数能够有效缩短发现时间,但这一效果逐渐减弱。当巡逻员达到4~5人后,继续增加巡逻员对缩短发现时间的作用趋于平缓。特别是在较小房间(例如20×20)中,进一步增加安全巡逻员的效果尤为有限,显示出边际效应递减的趋势。
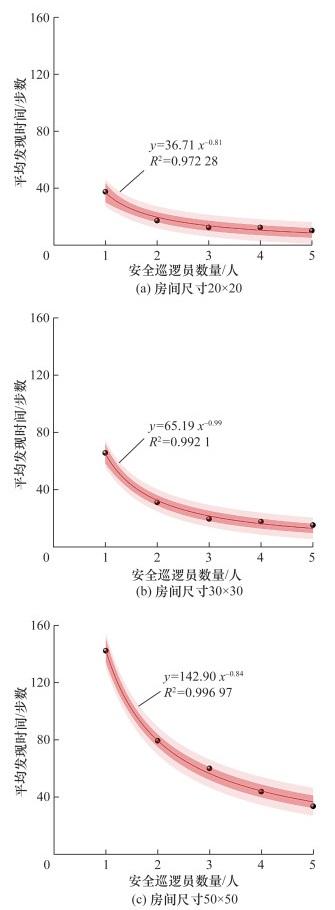
进一步分析发现,事故征兆的发现时间与安全巡逻员数量的关系在不同房间尺寸下均符合负幂次递减规律(以房间尺寸20×20、30×30、50×50为例,拟合优度R2均超过0.99),如图 7所示。
2.4 不同人群密度与安全巡逻员数量的影响
为进一步研究人群规模、房间尺寸和安全巡逻员数量对事故征兆平均发现时间的复合影响,引入人群密度(单位面积人数)参数,并与安全巡逻员数量及平均发现时间进行多因素拟合分析。再次对工况1至4进行仿真(人群密度分别为0.125、0.25、0.5、1),得到拟合结果如图 8所示。
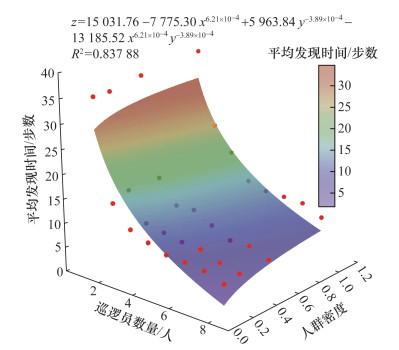
根据拟合结果,平均发现时间z与巡逻员人数x和人群密度y的关系可由式(9)表示。拟合优度R2约为0.8表明,式(9)较好地刻画了人群密度和安全巡逻员数量对事故征兆平均发现时间的复合影响关系。
结合图 8和(9)分析可知,增加安全巡逻员人数对缩短平均发现时间的影响相对更显著。从模型系数来看,巡逻员人数的影响系数(-7 775.30)绝对值大于人群密度的影响系数(5 963.84),说明在相同幅度变化下,增加巡逻员人数比降低人群密度对缩短发现时间的贡献更大。此外,交叉项系数(-13 185.52)表明,在巡逻员数量较多且人群密度较低的情况下,两者的协同作用可进一步缩短发现时间,但巡逻员数量仍是主要影响因素。因此,在优化事故征兆发现效率时,优先增加巡逻员人数比单纯降低人群密度更具实际效果,尤其在人群密度较低的环境下,巡逻员人数增加对发现时间的缩短作用相对更显著。
2.5 视野覆盖率分析
在模拟仿真过程中,记录了各工况安全巡逻员的视野轨迹。图 9为房间尺寸20×20、人群规模50人、安全巡逻员数量为5人时的示例。
本节将计算安全巡逻员从开始巡逻到发现事故征兆期间的视野轨迹总面积占空间总面积的比例,即视野覆盖率,以分析随着安全巡逻员人数增加,事故征兆发现时间减少效果降低的原因。本文选取了工况1—3、6和7的视野覆盖率及达到上限时间步数进行对照分析,结果如图 10所示。可以看出,随着安全巡逻员人数增加,视野平均覆盖率逐渐上升,但增幅递减并趋于稳定,表现出边际效应递减的趋势。例如,在房间尺寸为20×20、人群规模为200人的条件下,安全巡逻员从1人增至3人时,视野平均覆盖率从约59.0% 提升至61.7%;而安全巡逻员从5人增至7人时,视野平均覆盖率仅从64.6% 增至64.8%,增幅显著减小。这是因为在安全巡逻员人数较少时,每增加1人,显著扩展了视野覆盖区域;而当视野覆盖率接近上限时,剩余“盲区”减少,新增安全巡逻员的边际贡献下降。

进一步分析发现,房间尺寸和人群规模也会影响视野覆盖率的提升效果。在相同房间尺寸下,人群规模越大,视野覆盖率越高。例如,在3名安全巡逻员条件下,人群规模为50人时的视野平均覆盖率为57.6%,而200人时为61.7%,如图 10a所示。这可能是因为在人员密集时,安全巡逻员的视野受到的遮挡增加,迫使巡逻员更频繁地调整位置以维持有效监控,从而无意中扩大了视野覆盖范围,提高了整体视野覆盖率。在相同人群规模下,房间尺寸越小,视野覆盖率越高。例如,在5名安全巡逻员条件下,20×20房间的视野平均覆盖率约为64.7%,而40×40房间为63.0%,如图 10b所示。这是因为在小空间内,安全巡逻员的视野更容易覆盖整个区域,视野资源利用效率更高,进而提高了整体视野覆盖率。
此外,从图 10可以看出,随着人群规模和房间尺寸的增加,视野覆盖率达到上限所需的时间逐渐增加。具体而言,随着人群规模增大,视野遮挡增加,安全巡逻员需要更多时间来扩展覆盖范围。例如,房间尺寸为20×20、人群规模为50人时,4名安全巡逻员视野平均覆盖率达到上限的时间约为9步,而在200人条件下,所需时间约为12步。同样,随着房间尺寸增大,安全巡逻员需要覆盖更大的区域,导致视野覆盖率饱和时间(即达到一个稳定值的时间)延长。例如,人群规模为200人、房间尺寸为20×20时,5名安全巡逻员平均视野饱和时间约为8步,而40×40房间则约为24步。
3 结论
针对人员密集场所,本文通过构建安全巡逻员视野模型,考虑房间尺寸和人群规模等因素,研究了视野遮挡条件下安全巡逻员数量配置对事故征兆发现效率的影响及其深层次原因。主要结论如下:
1) 建立了安全巡逻员视野模型。该模型在计算安全巡逻员实际视野面积时分为无遮挡、遮挡盲区无重叠和遮挡盲区重叠3种情况。该模型可根据安全巡逻员行进方向一定范围内行人数量实时计算其视野面积,动态调整其视野范围。
2) 研究了安全巡逻员人数对事故征兆发现时间的影响规律。增加安全巡逻员人数可以显著缩短事故征兆的发现时间,但这种缩短效果会随安全巡逻员人数的增加而逐渐减弱,呈现出负幂次递减规律。此外,在较高人群密度条件下,固定数量的安全巡逻员需要更长时间才能发现事故征兆,但在此类情境下适当增加安全巡逻员人数对缩短事故征兆发现时间的效果更为显著。
3) 揭示了随巡逻员数量增加事故征兆发现时间减少效果逐渐减弱的原因。随着安全巡逻员人数增加,视野平均覆盖率达到上限所需时间逐渐缩短并趋于稳定,新增巡逻员的边际效应减弱,事故征兆发现时间的缩短效果也逐渐受到限制。相对而言,这种边际效应递减在房间尺寸较小或人群规模较小时显现更快。
4) 安全巡逻员不仅负责发现事故征兆,还需迅速传播信息并引导人群疏散。基于本文研究结果,未来将深入探索如何将事故征兆的发现与信息传播和人群疏散相结合,

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}