

沉管的浮运和沉放是沉管隧道施工过程中风险较大和对技术要求较高的环节,保证沉管按计划浮运和安装是工程管理的关键。在沉管长距离浮运过程中,恶劣的海上环境(风、浪和流等)可能造成沉管过大的运动响应,从而影响沉管浮运的稳定和安全。
深中通道项目沉管浮运安装采用将沉管浮运、定位、沉放和安装综合于一体的专业施工船舶(以下简称“一体船”) 实施。一体船总长190.40 m,型宽75.00 m,片体内侧跨距56.80 m,型深14.70 m,船体质量23 200 t,浮运沉管状态下吃水7.10 m,配备2台9 280 kW的主推进系统和8台2 600~3 000 kW的侧推系统。
一体船在深中通道项目中实现了快速和安全浮运沉管的目标,在浮运沉管情况下,现场实测最大航速可达5.8 kn,47.0 km的浮运线路仅需7~8 h,减少了社会航道占用时间,提高了沉管浮运作业效率。
1 浮运工况
1.1 作业区域基本条件
沉管隧道施工面临海洋气象环境带来的挑战,以港珠澳大桥和深中通道项目所在的珠江口区域为例,该区域水流、潮汐、含沙量、含盐度和阵风等环境复杂多变,给沉管的浮运和安装带来较大困难。极端情况下,该区域水位变化幅度超过4.5 m。区域内以不规则半日潮为主,小潮持续时间短,大潮落潮时表层最大流速超过1.1 m/s,潮差为0.9~1.7 m。大潮期间水体平均含沙量为0.041 kg/m3,小潮期间水体平均含沙量为0.027 kg/m3。工程沿线受岛屿的掩护,各工况下,当波高超过5.0 m的外海海浪传入工程海域时,均衰减至3.5 m以下,波浪周期一般不超过6 s。区域内的水体含盐度与潮位成正比,随半月周期变化,朔望月潮差大,盐度较高;上下弦月潮差小,盐度较低。桂山岛区域,大潮期间水体含盐度为13.53‰~32.92‰,小潮期间水体含盐度为8.12‰~31.39‰;深中通道区域,大潮期间水体含盐度为9.41‰~13.74‰,小潮期间水体含盐度为7.83‰~9.86‰。每年5—10月,珠江口区域内台风、强对流天气频发;每年11月至次年3月,该区域受冷空气影响持续时间长。
1.2 浮运阻力
沉管浮运的姿态与水阻力的分布情况密切相关。沉管浮运状态下以较低航速航行,可理解为一个100 000 t级的矩形浮体在低速推进。深中通道项目管节的指标参数如表 1所示。
表 1 管节指标参数 |
| 指标 | 标准管节 | 非标管节E1 |
| L×B×H/(m×m×m) | 165.00×46.00×10.60 | 123.50×46.00× 10.60 |
| 结构 | 钢壳混凝土 | 钢壳混凝土 |
| 综合密度/(kg·m-3) | 2.603 | 2.603 |
| 质量/t | 76 770 | 57 450 |
注:L、B和H分别为管节的长、宽和高。 |
沉管作为一种超低干舷的大型浮体,在静水无航速状态下主要受重力G、浮力和侧面水压力的作用,如图 1a所示。在管内压载水排空状态下,G与浮力平衡时,沉管的干舷高度为0.30~0.45 m(干舷高度与混凝土容重和管内附属设施质量有关),该工况为沉管浮运过程的初始状态。
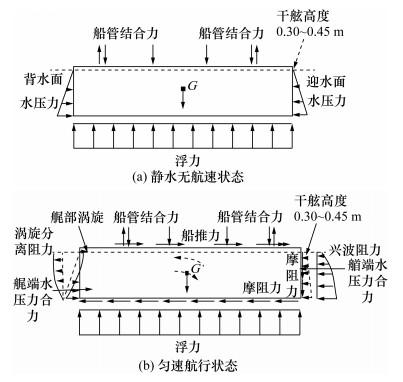
在沉管以一定航速匀速航行时,除受上述作用力外,还增加了管艏端面的兴波阻力、涡旋分离阻力和浸水面上的摩阻力,这3种力构成了沉管的浮运航行阻力,如图 1b所示。沉管艏端迎水面出现一定程度的兴波现象,兴波形成的水压力提高了迎水面水压力,使迎水面水压力合力点上移;沉管艉端出现涡旋分离现象,降低了艉端水压力,使艉部水压力合力点下移;沉管底面和两侧湿表面产生指向艉端的摩阻力。沉管底部摩阻力形成顺时针(艏端向下)旋转力矩;艏端兴波和艉端涡旋形成的合力点位置改变,形成逆时针(艏端上抬)旋转力矩;由于干舷的存在,因此沉管湿表面的摩阻力也会形成顺时针旋转力矩。
沉管匀速航行状态下,阻力分布较复杂,图 1b中对各种阻力的变化趋势仅可进行定性分析,纵倾姿态变化的受力原理需结合现场实测和必要的数值计算进行定量分析。
2 姿态响应实测
2.1 现场实测
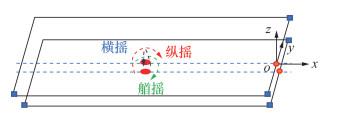
为进一步研究沉管浮运姿态响应问题,在深中通道项目沉管浮运现场,对沉管和一体船在水中6自由度(横荡、纵荡、升沉、横摇、纵摇、艏摇)的运动状态进行监测,如图 2所示。
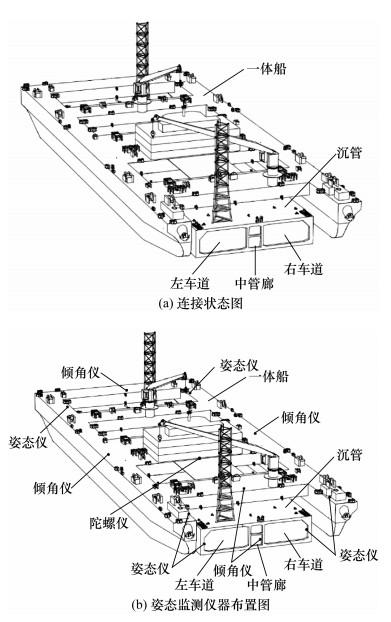
一体船与沉管连接状态和姿态监测仪器布置如图 3所示。对一体船和沉管的横荡、纵荡、升沉监测由姿态仪实现;横摇、纵摇监测由倾角仪配合高频采集设备实现;艏摇监测由陀螺仪实现。
2.2 实测数据
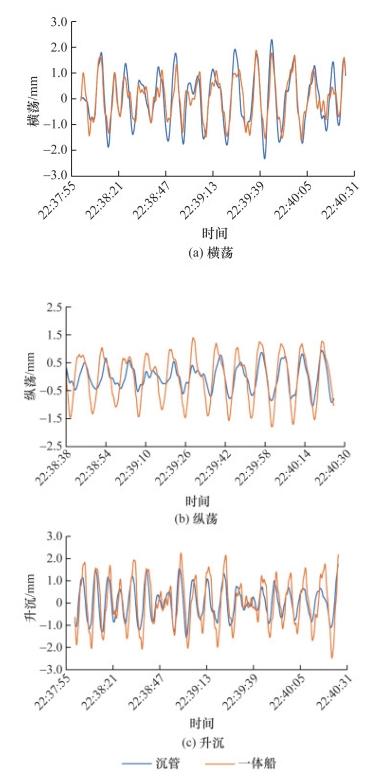
现场实测数据表明,沉管与一体船的运动状态具有周期和相位相似、幅值差距较大的特点,如图 4所示。说明沉管与一体船在波浪等环境作用下,具有共同运动的特性,二者实测运动幅值的差异主要与测点在一体船和管节上布置的位置不同有关。
现场实测沉管浮运过程中纵倾角θ和航速v的变化情况及其对应关系如图 5所示,在一体船启动加速时,一体船和管节出现短暂的艏部上扬(θ为负),随着v增大,沉管逐渐转为艏部向下的纵倾,θ与v呈较明显的正相关性。
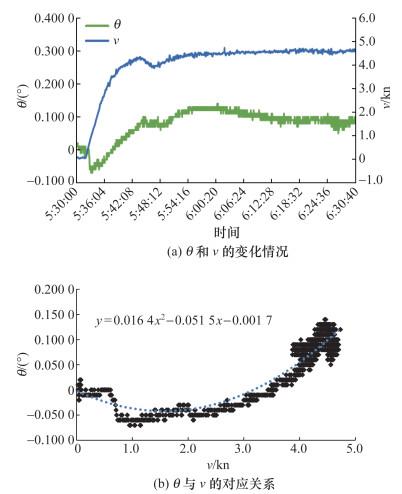
沉管浮运过程中出现的纵倾现象比较典型,在类似工程(如港珠澳大桥沉管隧道)中也有发生。较明显的纵倾不仅使沉管的浮运效率降低,而且对船体稳定性和船管连接件受力等均有影响。研究沉管产生纵倾现象的水动力学原理,并进行技术论证,是解决该问题的关键。
3 水动力学数值模型
3.1 数值模型
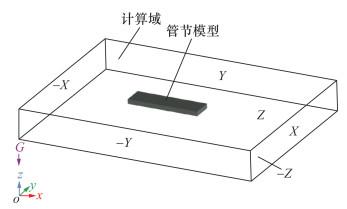
为进一步研究沉管浮运工况下周围的流场状态,本文采用FLOW-3D软件建立单管节浮运工况数值模型,流场控制采用三维非定常N-S(Navier-Stokes)方程。
管节模型按标准管节尺寸建立,计算域的长、宽、高分别为700.00、300.00、30.00 m,如图 6所示,水体沿x轴正向流动,-X为入流边界,X为出流边界;Y和-Y均为对称边界;Z为对称边界,-Z为固壁边界。
在数值模型中,沉管有沿z轴方向的沉浮运动和绕质心y轴的纵倾运动2个自由度。沉管干舷高度为0.30 m,沉管水面以下高度h为10.30 m,沉管质量M等于排水量(海水密度ρ取1 025.000 kg/m3),表示如下:
沉管绕质心y轴的转动惯量Iyy表示如下:
模型入口边界水流速度为2.3 m/s, 模型计算工况如表 2所示。
表 2 数值模型计算工况 |
| v/kn | 流向 | 流速/(m·s-1) | 备注 |
| 4.0 | 逆流 | 0.2 | 重点考虑摩阻力(流体黏性)对管节的影响 |
3.2 数值计算
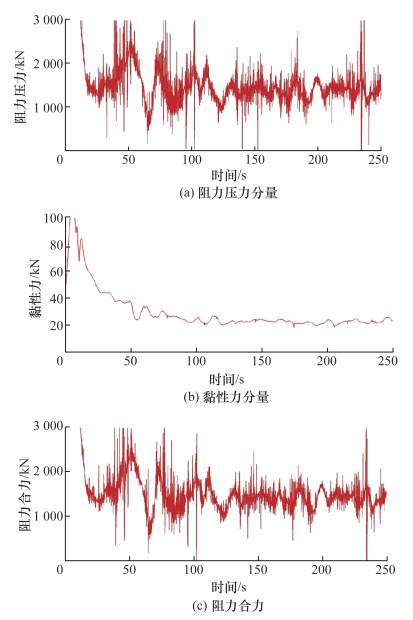
沉管浮运过程中,阻力压力分量、黏性力分量和阻力合力随时间的变化如图 7所示。阻力压力分量平均值约1 394 kN,黏性力分量均值约22 kN,阻力合力均值约1 416 kN。阻力压力分量远大于黏性力分量,沉管浮运状态下,阻力主要为沉管艏端的兴波阻力,黏性力引起的摩阻力仅占总阻力的1.50%。
沉管浮运状态下, 自由水面分布和沉管纵倾历程如图 8所示,管节艏部出现明显上水现象,兴波明显,迎水面压力显著上升,沉管姿态纵倾(艏部下倾),经过短时间波动后,θ维持在0.130 0°~0.140 0°范围。
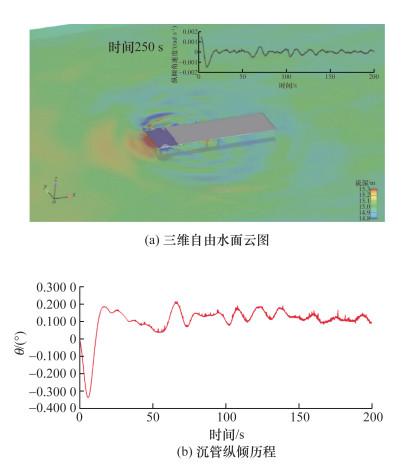
模型计算v=4.4 kn时,θ均值为0.140 0°;现场实测v=4.5 kn时,θ均值为0.130 0°。在浮运工况接近情况下,模型计算值与实测结果基本一致,说明模型计算过程中各项参数取值合理,结果拟合良好。沉管纵倾伴随艏部上水现象与实际浮运情况相似,说明艏部上水是低干舷矩形浮体浮运过程的典型特征。
沉管周边流场呈明显绕流状态,如图 9a所示,艉端出现回流,在管艏端面存在较大的动水压力。在管艏底部,由于存在流场绕流,因此出现较明显的斜向下流速矢量,向下的动水压力在管艏底部形成静水压力削弱区域,使管艏底部的静水浮托力降低,进而导致管艏的平衡力减小,产生艏端向下的旋转力矩。
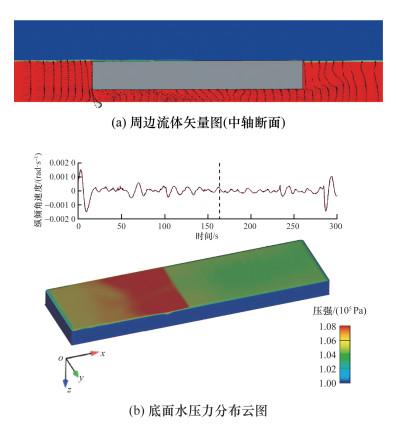
沉管底面的压力分布情况也验证上述问题,如图 9b所示,在沉管浮运航速达到一定值时,沉管底面接近艏端区域水压力值降低,产生使沉管前倾的力矩;在沉管底面中前部,由于流场回流作用,因此该区域压力有一定程度的增大,在沉管发生前倾后重新达到平衡。
沉管在水动力作用下的姿态响应经数值模型初步分析,可将原有定性分析深化,沉管匀速浮运状态简化受力模型如图 10所示。
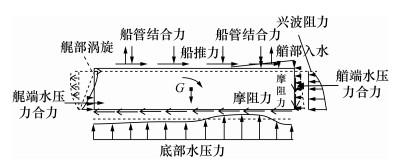
沉管浮运加速至匀速过程的步骤如下:
步骤1 沉管在一体船的拖带下启动加速,艏部开始兴波和艉部出现涡旋,兴波压力的作用力矩为艏扬,沉管在加速初始短时间内出现艏部上扬现象。
步骤2 沉管航速增大,艏端底部出现绕流,带来竖直向下的加速流场,沉管底部水压力在竖向流场作用下被削弱,产生艏端下倾力矩,沉管开始出现艏端下倾现象。
步骤3 沉管达到一定航速并稳定后,受底部回流和水深增大的影响,沉管底部前半段水压力明显上升,抑制了艏端下倾趋势,沉管在匀速状态下保持平衡,以一定艏倾的典型姿态匀速前进。
3.3 船管结合
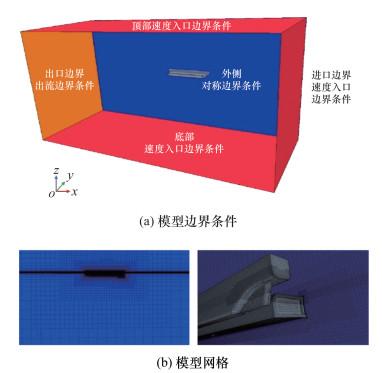
将一体船浮运沉管的整体情况进行数模分析,采用计算流体力学(computational fluid dynamics,CFD)法直接求解RAN-S(Reynolds-averaged N-S)方程,对船体周围的流场进行数值模拟,自由面处理采用流体体积分数(volume of fluid,VOF)法,微分方程的离散使用有限体积法,压力和速度耦合采用分离解耦的半隐式压力修正法(semi-implicit method for pressure-linked equations,SIMPLE),湍流模型采用标准k-ε (k为湍动动能;ε为湍流耗散率)模型。本文采用1∶40缩尺比例的模型进行数值模拟,分别取4.0和6.0 kn航速的流场与数值模拟结果进行对比分析。
建立一体船与沉管连接后的数值模型,如图 11所示。考虑对称性采用一侧模型,模型流场进口边界(速度入口边界)与船艏的距离为船长的2倍,流场出口边界(出流边界)与船艉的距离为船长的3倍,外侧对称边界与对称面的距离为船长的2倍。对船体、附近网格和自由面进行网格加密,可更精确地捕捉流场细节,反映实际流场。对于2条给定的非深水航道,根据实际情况将航道的边界条件作为进口边界条件,但需在垂直于航道平面的方向适当加密网格。
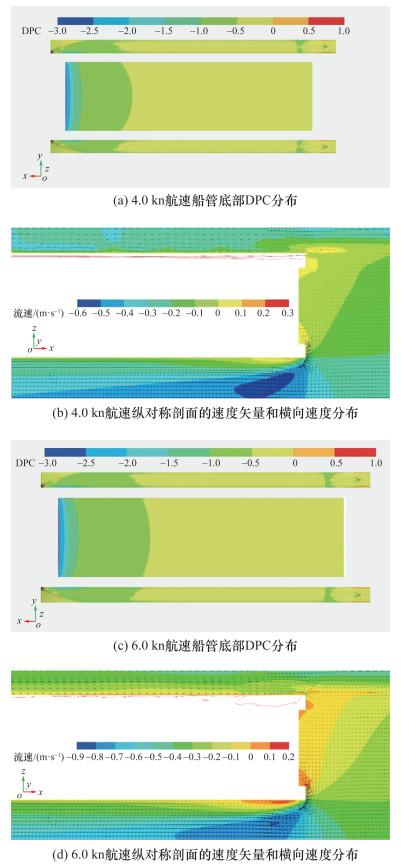
模型计算得到的4.0和6.0 kn航速时船体动压力系数(dynamic pressure coefficient,DPC)(仰视)、纵对称剖面的速度矢量和横向速度分布情况如图 12所示。
4 结论
本文通过对沉管在浮运状态下的理论和实测研究,初步分析了沉管浮运过程中出现纵倾现象的水动力学原理,得出如下主要结论:
1) 沉管的几何形状为非流线型钝体,端面(迎水面)阻力远大于普通流线型船舶,兴波阻力和涡旋分离阻力组合形成的剩余阻力为沉管浮运的主要阻力。
2) 沉管在一定航速状态下,艏端下倾的主要原因是水流在艏端底部形成向下的绕流场,竖向流场使沉管底部靠近艏端区域的水压力降低,从而出现明显的纵倾现象。
3) 水的黏性对沉管的摩阻力仅占总阻力的1.50%,对沉管浮运产生的影响可忽略不计。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}