

近年来,全球范围内可再生能源发电量占比不断上升,开发成本持续下降。在2021年,38%的全球电能来源于清洁能源,风能和太阳能首次提供了超10%的全球电能,其中风能占比6.59%[1]。对于大多数国家,发展清洁能源、降低对化石燃料的依赖、重构能源供给体系,不仅是为了应对日益严峻的环境和气候问题,也是为了预防能源出口国可能颁布的限制性单边政策。中国拥有400多万平方公里的海域总面积,海上风能资源丰富,可开发和利用的风能储量高达7.5亿kW[2]。相比于陆上风电,海上风电基本不受地形地貌影响,不占用土地资源,对人类的生产生活影响更小,并且海上风速更高,年利用小时数更高[3]。另外,中国沿海经济区电力需求大,就地开展海上风电项目能够显著降低运电成本。随着海上风能资源开发利用区域水深逐渐增加,传统的海上固定式风机总成本急剧增加,漂浮式风机优势凸显[4]。漂浮式风机不仅能够开发更远更深区域风资源、扩大海上风资源的利用范围、突破水深对风机系统施工和安装的限制,也能有效减少对近岸渔业区和旅游区的影响,因而发展漂浮式风机是中国开发海上风能资源的必然趋势。
锚泊系统是漂浮式风机的重要装备之一,对漂浮式风机的运行安全、经济成本和发电效率有着重要影响。近年来,为了提高发电效率和经济性能,海上漂浮式风机发展呈现转子直径更大、塔架更高的趋势[3],上部风机转子直径高达百米级,相应的支撑基础尺寸也不断增大,整机系统受到较大的环境载荷作用,这使得漂浮式风机锚泊系统的优化设计面临更大的难题。此外,中国南海海域常年受到台风侵扰,这对在该区域服务的漂浮式风机锚泊系统提出了更高的要求。
水深是影响锚泊系统设计的重要因素之一,对悬链线式锚泊系统经济成本的影响十分显著[5]。Huang等[6]的研究表明,水深较小时锚链设计质量随水深减小呈指数增长。水深为50 m时,由锚链组成的锚泊线最重。这是由于悬链线式锚泊系统主要由悬浮段锚链重力为系统提供回复力,而在小水深条件下,由于锚泊线悬浮段较短,为提高对大功率漂浮式风机的定位能力,需要增加锚链质量,这造成了小水深锚泊系统的高成本。另外,相比于深水锚泊系统,小水深锚泊线的初始顶张角较大,在环境载荷作用下,随着锚泊线顶端位移变大,小水深锚泊线顶张角迅速增大,导致更大的张力增量,从而产生更大的锚泊张力极值,这对小水深锚泊安全性能方面的设计分析提出了更高的要求[7]。因此,有必要对小水深锚泊系统进行切实有效的优化设计以达到降本增效的目的。
目前,锚泊系统优化设计目标主要包括锚泊系统的定位性能(平台位移范围)、锚泊系统安全性能以及经济性能3方面。
大多数锚泊系统的优化设计研究以提高锚泊系统定位性能为主要目标。Shafieefar和Rezvani[15]提出了一种基于遗传算法的锚泊系统设计方法,该方法基于加权和法将目标函数进行归一化,以最小化纵荡和横荡响应为目标建立了锚泊系统单目标优化问题。Felix-Gonzalez和Mercier[16]提出了一种基于静态等效和遗传算法的锚泊设计方法,并以最小化六自由度运动响应为优化目标。Monteiro等[17]提出了一种基于粒子群优化(PSO)方法和差分进化(DE)方法的锚泊系统设计方法,并通过一种平均方法将目标函数归一化,以最小化平台运动幅值为目标开展优化工作。Maffra等[18]、Montasir等[19]和Carbono等[20]均以锚泊线角度为变量,以最小化平台位移为优化目标,基于遗传算法或粒子群优化算法开展优化研究。
本文基于已有研究结合实际工程需求,提出了兼顾锚泊系统定位性能、安全性能和经济性能的多目标智能优化设计方法,并基于遗传算法开发了相应的锚泊系统智能优化设计程序;利用上述优化设计程序,以某项目中针对南海海域50 m水深设计的15 MW大功率漂浮式风机为研究对象,考虑工作工况、极端工况和破断工况等典型工况,开展了锚泊系统优化设计研究,并结合时域全耦合计算分析方法,验证了优化方案的优越性,同时证明了该锚泊系统智能优化程序的可靠性和有效性,为漂浮式风机锚泊系统优化设计提供了技术支撑。
1 锚泊系统分析及优化算法
1.1 锚泊系统回复力分析方法
通常,在锚泊系统设计初期可采用静力分析方法求解锚泊系统的回复力特性,静力分析基于锚泊线在每个时刻处于静力平衡状态的假设,忽略了拖曳力和惯性力等动力效应,主要包括悬链线法和分段外推法。悬链线法计算相对简便,但该方法假设只有重力和浮力作用在锚泊线上,忽略了锚泊线的弹性伸长和海流力。而分段外推法可以考虑流体法向和切向拖曳力、海底摩擦力以及锚泊线弹性伸长,为了获得更准确的结果,本文基于分段外推法建立锚泊准静力计算分析模型。分段外推法将锚泊线离散成m个锚泊线单元(segment),各单元视为无质量的弹簧,通过有质量的节点(node)相连。node-1表示锚泊线与漂浮式平台导缆孔相连处的节点,node-n表示锚泊线与锚固基础相连处的节点。锚泊线单元的浮力F、浮容重P和流体拖曳力D均等效集中在单元中心处。计算时,只考虑锚泊线轴向刚度,忽略锚泊线的弯曲刚度和扭转刚度。锚泊线上任意单元的受力分析如图 1所示。
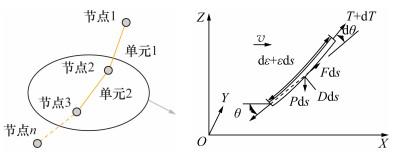
忽略无穷小量,可得到锚泊线单元控制方程如下:
其中: Ft和Fn分别为锚泊线单元上的切向拖曳力和法向拖曳力,P为锚泊线单元浮容重,ε为锚泊线单元伸长量。
其中: EA为锚泊线轴向刚度,ρ为海水密度,Vc为海流速度,Ct和Cn分别为切向和法向拖曳力系数,A为投影面积。
由锚泊线单元的几何关系可得
其中:x为横向位移,z为垂向位移。
其中:TXi和TXi+1分别为第i个和(i+1)个锚泊线单元的水平张力,Ti+1为(i+1)单元的总张力;TZi和TZi+1分别为第i个和(i+1)个单元的垂向张力;Fti和Fni分别为第i个单元切向拖曳力和法向拖曳力;θi为第i个锚泊线单元偏角。
锚泊线单元节点坐标的空间关系可表示为
在锚泊静力计算分析中,假定锚泊线只承受拉力而没有压力、弯矩和扭矩。对锚泊线进行数值分析时,通过设置合适的边界条件检验锚泊线最终形态是否符合要求,本研究分析模型采用水深作为边界条件,求解步骤如下:
1) 假定锚泊线顶端张力与水平方向的夹角为α(°),顶张角为(90-α)(°);
2) 把锚泊线划分成若干单元,将每个单元上的重力、浮力以及拖曳力都简化到单元中心上;
3) 把前一段锚泊线单元的末节点作为下一个锚泊线单元的起始点;
4) 根据上述公式求出锚泊线上各单元的T和单元节点坐标;
5) 对水深边界条件进行验证,检验锚泊线最末单元的垂向坐标是否为水深H。如果满足水深边界条件,则认为锚泊线顶端单元与水平方向的夹角为θ,计算结束;否则返回步骤1)重新计算。
基于上述计算方法和算法流程,在静力分析程序中给定锚泊线属性并为锚泊线初始跨距赋值后,可得出对应的顶张角和顶张力以及锚泊线上各单元的张力及其坐标。基于锚泊线分析方法,可计算单根锚泊线的横距-顶端张力关系曲线以及浮式平台水平位移所对应的各系泊缆横距,进而求解出锚泊系统提供的静回复力。
1.2 遗传算法
本文提出的锚泊系统多目标设计优化方法结合了1.1节中的锚泊系统静力分析程序和遗传算法(genetic algorithm, GA)。GA是以自然选择和遗传理论为基础,将生物进化过程中适者生存与群体内部染色体的随机信息交换机制相结合的高效全局寻优搜索算法[30]。GA摒弃了传统的搜索方式,借鉴了Darwin的进化论和Mendel遗传学说,模拟自然界生物进化过程,采用人工进化的方式对群体反复进行基于遗传学的操作(遗传、交叉和变异)。根据预定的目标适应度函数对每个个体进行评价,依据适者生存、优胜劣汰的进化规则,不断得到更优的群体,同时以全局并行搜索方式来搜索优化群体中的最优个体,以求得满足要求的最优解。
与传统经典优化方法相比,GA的本质有以下不同:1) 传统搜索方法是单点搜索,GA具有群体搜索特性,能同时对搜索空间中的多个解进行评估;2) GA不需要辅助信息,只需影响搜索方向的目标函数和相对应的适应度;3) GA使用概率变换规则,而不是确定的变换规则。
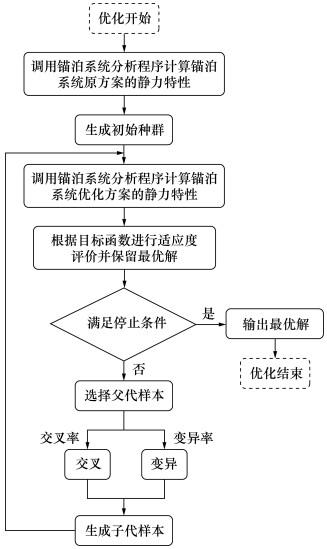
GA具有高效、鲁棒性强等优点,广泛应用于求解非线性、多模型、多目标等复杂系统优化问题。本文基于GA进行锚泊系统设计参数寻优分析,程序分析流程如图 2所示,由图可知,首先调用锚泊系统分析程序计算锚泊系统原方案的静力特性,生成初始种群,然后继续调用锚泊系统分析程序计算优化方案的静力特性,对目标函数进行适应度评价,判定是否满足条件,若满足则输出最优解,若不满足则选择优秀父代样本经交叉或变异后生成子代样本,将子代样本重复上述操作,直至满足条件、计算终止。其中,种群数量和迭代次数是GA的2个重要参数,直接影响了算法的性能和效率。种群数量越多,搜索空间越广,寻到全局最优解的概率也越大,但同时会增加计算成本,本研究中的种群数量设为300个。迭代次数是指算法循环执行的次数,即每一代生成和选择的过程,数值越大找到最优解的几率也越大,但会导致运行时间变长,本研究中的迭代次数设为50。
其中:f(x)表示目标函数;k表示评价指标的个数;fj, nor(x)表示第j个评价指标的归一化值;wj表示第j个评价指标的权重值,代表相应子目标fj, nor(x)在多目标优化问题中的重要程度以及对目标的偏好。
2 锚泊系统优化设计方法
2.1 优化设计目标、参数和约束条件
本研究中的目标函数主要考虑了3方面指标:锚泊系统的安全性能、定位性能和经济性能。锚泊系统的安全性能校核内容主要包括极限状态校核(ultimate limit state,ULS)、故障状态校核(accidental limit state,ALS)和疲劳破坏状态校核(fatigue limit state,FLS)。极限状态校核是为了确保锚泊线有足够的强度承受极端环境条件下的载荷,极端环境载荷工况一般选取50 a重现期。故障状态校核是指当锚泊系统失去任何一根锚泊线时,仍能承受极端环境条件下的负载,不至于产生走锚现象。根据文[33],在锚泊设计优化阶段,可只考虑极限状态校核和故障状态校核。
本研究中的15 MW漂浮式风机在锚泊系统原方案的限制下,各工况条件下的运动范围均符合要求,水平位移不超过30 m。由于原方案定位性能较好。因此,在对锚泊系统的优化过程中,保证了优化方案的定位性能与原方案基本相同。且为提高寻优效率,着重关注20~30 m水平运动范围内原方案和优化方案中的锚泊系统水平回复性能,该目标可由式(14)表示。
为保证优化后锚泊系统的安全性能,安全系数须符合规范要求,也可尽量大于或等于原方案中的安全系数。另外,出于对经济性能的考虑,优化后的3组×3根(以下简写为3×3)锚泊系统方案的建造、施工成本要小于或等于原始方案。因此,本文提出的锚泊系统优化设计准则可表示为
其中:Ff(x)和Fo(x)分别为系泊系统优化方案和原方案位移x时的水平回复力。ys为规范要求的安全系数,根据ABS规范要求,取值为2;${\bar T}$f, i为锚泊系统水平移动30 m时,锚泊系统中出现最大张力的锚泊线顶张力;MBL为最小破断力。w1、w2和w3分别是3个子目标函数对应的权重,分别取值为0.3、0.3和0.4。Costf和Costo分别表示锚泊系统优化方案和原方案的成本。锚泊系统的成本需要综合考虑制造成本、安装成本和运维成本等,包含的对象主要有锚泊线、锚固基础、锚泊附件和连接件等。在本研究中的算法程序主要考虑了锚泊线、锚固基础和锚泊附件(重块)的制造成本和锚泊系统的安装成本。
本研究中的锚固基础选用拖曳锚,其设计质量和极限承载力(ultimate holding capacity,UHC)有关,详见ABS相关规范[34]。
表 1 锚泊系统相关参考成本[35] |
| 参数 | 单位 | 数值 |
| 重块售价 | 欧元/t | 2 500 |
| 锚固基础售价 | 欧元/t | 6 705.9 |
| 锚链售价 | 欧元/t | 2 500 |
| 安装费用 | 欧元/套(缆和锚) | 55 000 |
锚泊系统的优化设计涉及参数众多,包括锚泊线直径d、质量、刚度EA、长度L、跨距、预张力等。其中,锚泊线的单位质量和刚度与锚链规格和直径相关。选用R4无档链,锚链单位浮容重和刚度可由下式得出:
其中,di为第i个锚泊线单元的锚泊直径,EAi为第i个锚泊线单元的锚泊刚度,g为重力加速度。
在d为确定值时,L、跨距和预张力三者知二推一。漂浮式风机安装范围受到水深和海域规划的制约,其锚泊半径具有一定的限制,在本研究的优化设计中锚泊半径保持不变,为718.5 m,因此须对L或预张力进行参数优化。
因此,本研究中的优化程序涉及的优化参数主要为d和L。根据工程要求和锚泊半径,两者的约束范围分别为
2.2 优化设计目的
在台风作用下,较大的风湍流强度、波高以及流速会使漂浮式风机遭受极大的环境载荷。对于10 MW以上的风机转子,在极端海况作用下即使停机也会产生显著的风推力。本文研究的漂浮式风机系统上部装有15 MW风机转子,直径高达240 m。当遭受极端海况时,停机的转子推力极值超过400 t。同时,极端海况下较大的波高和流速,对漂浮式风机锚泊系统的优化设计也提出了更高的要求。
对于须经受极大的环境载荷作用的大功率漂浮式风机,其锚泊系统通常采用冗余设计。每根立柱上设置一根以上锚泊线,锚泊线数量越多,锚泊系统的定位性能越好,并且每根锚泊线分担的环境载荷越少,安全性能也越好。但每多一根锚泊线,锚泊系统会相应地增加锚链用钢量、锚固基础数量以及其他锚泊附件,这既增加了锚泊系统建造成本,同时也增加了安装成本。因此锚泊系统的优化设计应在考虑锚泊系统安全性和定位性能的前提下,尽可能保证其经济性。
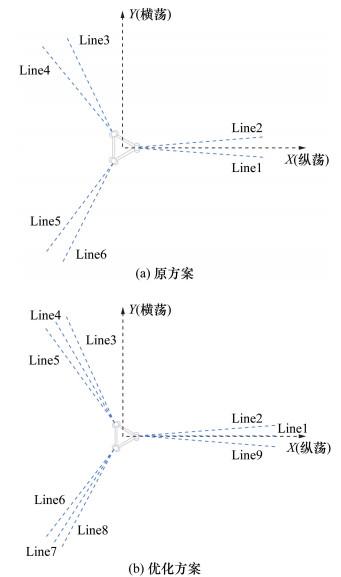
本文中的漂浮式风机系统的原锚泊方案,采用了3组×2根(以下简写为3×2)锚泊型式。该锚泊型式相比于3×3锚泊型式,节省了锚固基础,有益于提高经济性。为了提高锚泊系统的定位性能和安全裕度,锚泊线上串联了重块。重块可以减小锚泊线的动张力增量,进而减小锚泊动张力极值;此外,悬链线式锚泊系统主要靠自身重力提供回复力,增加重块即增加了锚泊系统的几何刚度,有助于提高锚泊系统的回复性能。但同时,在海况十分恶劣的环境条件下,有可能发生迎浪方向单缆破断这一故障工况。对于3×2锚泊系统来说,如果其中一组中的一根锚泊线发生破断,另一根锚泊线则要承受该方向所有的环境载荷,这有可能导致剩下的锚泊线接连破断,从而发生走锚以及平台倾覆等严重后果,造成极大的经济损失。因此,从极端海况锚泊故障工况的角度来说,3×3锚泊系统型式更加安全,因为发生单缆破断时,同方向还剩下2根锚泊线共同承担环境载荷。
因此,本文以中国南海海域50 m水深设计的15 MW大功率漂浮式风机系统为研究对象,对其锚泊系统开展优化设计研究,原锚泊系统采用3×2型式,优化后的锚泊系统采用3×3型式。在原方案基础上,锚泊系统的优化设计需满足以下目标:
1) 在锚泊系统原方案的定位下,该15 MW漂浮式风机运动范围符合工程要求,即水平位移不超过30 m,工作工况下最大倾角不超过10°,极端工况下最大倾角不超过15°。因而在优化设计中,将优化方案跟原方案具有相似的定位性能定为需满足的目标之一。
2) 优化后的锚泊系统需要符合安全规范要求,即在环境载荷的作用下,锚泊线安全系数应满足相关规范的安全校核要求。
3) 和原方案相比,优化锚泊系统采用3×3型式,增加了锚泊线和锚固基础数量以及相应的安装成本,为了保证优化方案的经济性,优化后锚泊系统的建造、施工总成本须不超过原锚泊系统的建造、施工总成本,并且成本越低越好。
3 算例设置与优化结果
3.1 15 MW大功率漂浮式风机系统参数
选用某项目中设计的适用于中国南海海域50 m水深的15 MW半潜式风机系统作为研究对象,该半潜式风机平台设计基于WindFloat技术。与其他半潜式风机平台相比(如DeepCwind风机),该平台结构省去了中心立柱,把塔筒和机组布置在一根立柱上,从而降低了结构的复杂性。平台的立柱之间既通过横撑连接又布置斜撑加强结构强度,采用了板梁结构与管结构混合的结构形式。立柱底部采用了垂荡板和浮箱结合的设计,既能通过增加压载保证稳性要求,又可以增加自身阻尼,使得平台固有频率避开波浪能量集中范围,有利于减小平台运动响应。为了提高锚泊系统的回复力性能,参考了“三峡引领号”漂浮式海上风电机组的导缆孔设计,锚泊系统中的导缆孔位置有别于传统锚泊系统导缆孔设置于水下的设计,该锚泊系统的导缆孔位于水上5 m处,并做了防腐涂料处理以提高防腐能力。同时,为配合上移的导缆孔位置,该平台的垂荡板不是正圆,保留了一定的外围空间,以减小平台运动过程中锚泊线与垂荡板的碰撞概率。
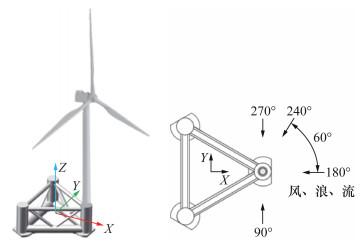
表 2 15 MW半潜式风机系统参数 |
| 参数 | 单位 | 数值 |
| 整机系统总质量 | t | 20 700 |
| 吃水 | m | 25 |
| 质心坐标 | m | x=45.03,y=0,z=-5 |
| Ixx | kg·m2 | 4.77×1010 |
| Iyy | kg·m2 | 4.77×1010 |
| Izz | kg·m2 | 3.29×1010 |
| 塔筒质量 | t | 952 |
| 转子质量 (包括机舱、叶片和轮毂) | t | 773 |
| 轮毂高度 | m | 150 |
注:Ixx为绕x轴的转动惯量,Iyy为绕y轴的转动惯量,Izz为绕z轴的转动惯量。 |
表 3 IEC 15 MW转子主要参数[36] |
| 参数 | 单位 | 数值 |
| 切入风速 | m/s | 3 |
| 额定风速 | m/s | 10.59 |
| 切除风速 | m/s | 25 |
| 转子直径 | m | 240 |
| 叶片质量 | t | 65 |
| 转子-机舱总质量 | t | 1 017 |
| 最大转速 | rpm | 7.56 |
3.2 锚泊系统优化结果
该半潜式风机锚泊系统原方案由3×2型式锚泊线组成,每组锚泊线间隔120°,一组内相邻2根锚泊线夹角为10°。悬链式锚泊系统的回复力主要由锚泊线重力提供,为了增大锚泊系统回复力,提高系统定位能力,在锚泊线上增加重块。重块总质量为108 t,每个重块的质量为12 t,每隔3 m连接一个重块,第一个重块布置位置沿缆长距导缆孔48 m。重块均视为圆球形,忽略物体表面粗糙度的影响,其水动力系数Cd、Ca跟无量纲KC(Keulegan-Carpenter)数和β数有关。对于不同KC数和β数下的Cd、Ca取值,已有较多可靠的试验和数值研究成果。根据本文中的KC数和β数取值范围,Cd取值为0.3,Ca取值为0.5[37]。
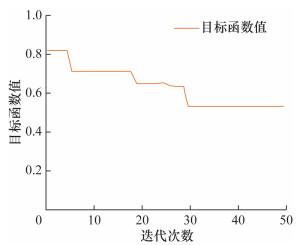
本研究中的目标函数值优化迭代过程如图 4所示。由图可知,迭代次数为50次时能得到稳定的目标函数值。
由图 6可知,基于本研究提出的锚泊系统智能优化程序迭代计算得出的优化方案与原方案水平回复力吻合良好,符合优化目标设定。
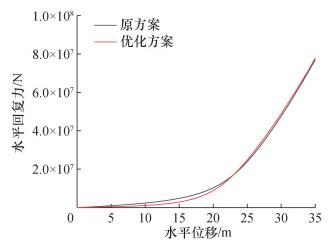
表 5 原方案与优化方案的建造和施工总成本 |
| 项目 | 原方案 | 优化方案 |
| 锚泊线成本 | 1 069 500欧元×6根 | 659 410欧元×9根 |
| 重块成本 | 270 000欧元×6根 | — |
| 锚固基础成本 | 628 260欧元×6个 | 404 330欧元×9个 |
| 安装费用 | 55 000欧元×6根 | 55 000欧元×9根 |
| 总成本 | 12 136 550欧元 | 10 068 670欧元 |
3.3 优化方案对漂浮式风机系统响应的影响
3.3.1 工况参数
该15 MW漂浮式风机设在中国南海50 m水深处运行,由于南海常年受台风侵扰,出现极端海况的几率较大。并且该风机转子直径为240 m,塔筒底部直径为10 m,风机转子和塔筒的水平投影面积较大,承受风载也较大。另外,风机轮毂中心高度在水面以上150 m,由于风速随着高度的增加而增大,因此该风机在极端海况下虽然停机仍能产生相当大的风推力。本文设置的各工况下的风、浪、流组合参数如表 6所示,其中风速指的是150 m高度处的平均风速,湍流强度为0.14,台风条件下的风切变指数为0.1。波浪模拟采用JONSWAP谱,谱峰升高因子取2.4。表中流速为表面流速,流剖面参考50 a重现期下的流速分布。相比于极端海况条件,当风机满载运行时虽然风速较小,但产生的风推力也很大,因此还需重点考虑风机满载运行时平台运动和锚泊张力的响应结果。破断工况Case b1指在极端环境工况下,出现最大张力的锚泊线发生破断故障;破断工况Case b2指在极端环境工况下,出现最大张力锚泊线的相邻锚泊线发生破断故障。在时域计算中,各个工况的时域分析历程为3 h,统计时域响应结果时,剔除了前1 000 s不稳定段。每个工况的时域统计值由对8组不同风、浪随机组合条件下的时域响应结果取均值得出。
表 6 各工况下的风、浪、流组合参数 |
| 工况编号 | 风速/(m·s-1) | Hs/m | Tp/s | 流速/(m·s-1) | 随机种子组合数 | |
| 工作工况 | Case 1 | 8 | 4.61 | 9.75 | 0.61 | 8 |
| Case 2 | 10.59 | 5.83 | 10.12 | 0.74 | 8 | |
| Case 3 | 16 | 7.01 | 10.45 | 0.82 | 8 | |
| 极端工况 | Case 4 | 51.09 | 11.12 | 14.41 | 2.00 | 8 |
| 破断工况 | Case b1 | 51.09 | 11.12 | 14.41 | 2.00 | 8 |
| Case b2 | 51.09 | 11.12 | 14.41 | 2.00 | 8 | |
注:Hs为有义波高,Tp为谱峰周期。 |
3.3.2 衰减试验结果
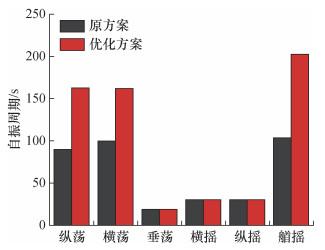
根据衰减试验模拟结果可得该15 MW半潜式风机在锚泊系统原方案与优化方案下的自振周期,如图 7所示。由图可知,锚泊系统对半潜式风机纵荡、横荡和艏摇方向上的自振周期影响很大。而垂荡、横摇和纵摇方向上的自振周期几乎不受锚泊系统变化的影响。原方案与优化方案中的风机系统纵荡自振周期分别为89.87 s和162.60 s,纵荡自振周期增大了80.9%;艏摇自振周期分别为103.65 s和202.38 s,艏摇自振周期增大了95.25%。
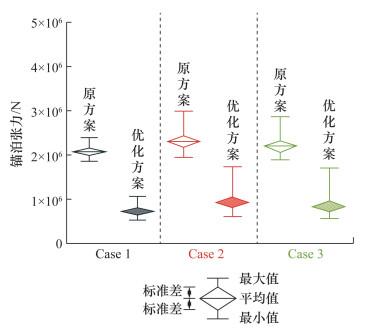
由衰减试验得出的系统等效线性阻尼如表 7所示,优化方案的纵荡和横荡阻尼分别比原方案增大了69.30%和21.43%,这是由于优化方案中增加了锚泊线数量,因此系统的锚泊阻尼显著增大,这有利于减小漂浮式风机系统水平运动从而减小锚泊张力极值。
表 7 无因次等效线性阻尼系数对比 |
| 阻尼系数 | ||||||
| 纵荡 | 横荡 | 垂荡 | 横摇 | 纵摇 | 艏摇 | |
| 原方案 | 0.228 | 0.168 | 0.120 | 0.079 | 0.088 | 0.103 |
| 优化方案 | 0.386 | 0.204 | 0.119 | 0.074 | 0.084 | 0.111 |
| 增长率/% | 69.30 | 21.43 | -0.83 | -6.33 | -4.55 | 7.77 |
3.3.3 工作工况
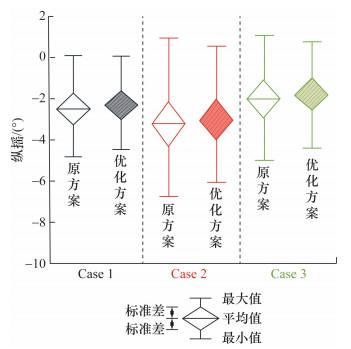
工作工况的波高和风速均较小,但在该风速下,风机转子运行,转子所受风载荷较大。尤其当风速为额定风速时,转子推力很大,此时漂浮式风机可能出现纵摇最大值。同时,工作工况下的风机纵摇角和发电效率相关,纵摇角度太大会降低发电效率。因而在工作工况下,需着重关注纵摇结果。
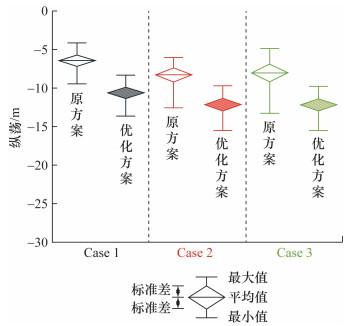
对于工作工况,由于纵荡运动最大值远小于30 m的设计要求,而风机上部风载荷较大,因而纵摇结果值得关注,由图 9可知,相较原方案,优化方案中的纵摇最大值、平均值和均方差均减小。1-1、1-2、1-3工况下,优化方案的纵摇角最大值分别减小了7.19%、10.28%和12.14%,更有利于提高风机的发电效率。
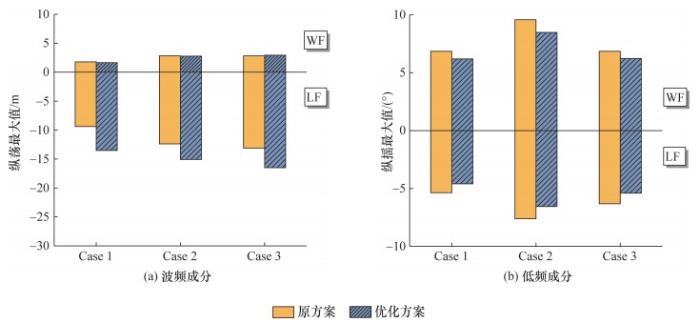
由图 10可知,在纵荡方向上,原方案与优化方案的纵荡波频成分计算结果基本一致,两者主要的差异表现在纵荡低频结果;在纵摇方向上,优化方案的波频和低频纵荡最大值较原方案小。由此可知,漂浮式风机纵荡运动由低频主导,纵摇运动的低频成分和波频成分运动范围相近,两者对纵摇总运动都有较大的影响。
3.3.4 极端工况
表 9 纵荡、纵摇和锚泊张力统计值 |
| 纵荡/m | 纵摇/(°) | 锚泊张力/N | ||||||||||||
| 最大值 | 极差 | 平均值 | STD | 最大值 | 极差 | 平均值 | STD | 最大值 | 极差 | 平均值 | STD | |||
| 原方案 | -24.17 | 15.21 | -15.89 | 1.71 | -6.75 | 9.85 | -1.87 | 1.38 | 1.16×107 | 8.38×106 | 3.80×106 | 7.94×105 | ||
| 优化方案 | -24.28 | 13.92 | -17.43 | 1.65 | -7.23 | 11.41 | -1.60 | 1.44 | 8.04×106 | 9.24×106 | 2.09×106 | 8.31×105 | ||
| 增长率/% | 0.46 | -8.48 | 9.69 | -3.5 | 7.11 | 15.84 | -14.44 | 4.35 | -30.71 | 10.30 | -44.93 | 4.67 | ||
注:STD(standard deviation)为标准差。 |
3.3.5 破断工况
由图 12可知,在破断工况Case b1和Case b2条件下,优化方案表现出了显著的优越性,纵荡和纵摇运动最大值均有明显减小。Case b1和Case b2中优化方案的纵荡最大值比原方案分别减小了6.28% 和5.80%,纵摇最大值分别减小了6.30%和6.79%。结果表明优化方案提高了漂浮式风机系统在锚泊破断工况下的稳定性。
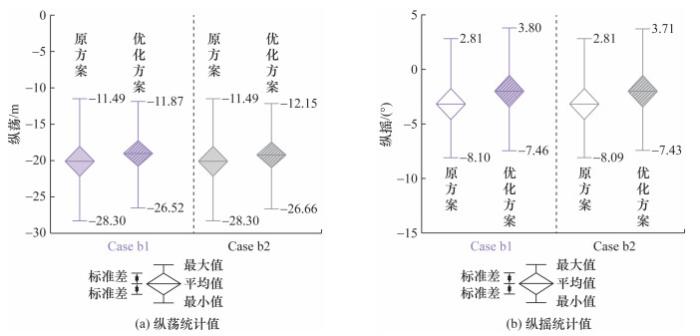
原方案与优化方案的锚泊张力时域统计结果以及相应的安全系数如表 10所示。由表可得,优化方案能显著降低锚泊张力最大值和平均值;对于单缆破断的故障工况,Case b1中原方案与优化方案的锚泊线安全系数分别为1.25与1.37;Case b2中原方案与优化方案的锚泊线安全系数分别为1.25与1.32。相比原方案,优化方案分别提高了Case b1与Case b2破断工况下的锚泊线安全系数的9.61%与6.02%,由此可知,优化方案显著提高了锚泊系统在破断工况下的安全性。
表 10 锚泊张力和安全系数结果 |
| Case b1 | Case b2 | ||||||||
| 最大值 | 极差 | 平均值 | STD | 最大值 | 极差 | 平均值 | STD | ||
| 原方案 | 1.93×107 | 1.84×107 | 6.47×106 | 2.02×106 | 1.93×107 | 1.84×107 | 6.47×106 | 2.02×106 | |
| 优化方案 | 1.19×107 | 1.03×107 | 2.97×106 | 1.58×106 | 1.23×107 | 1.26×107 | 3.17×106 | 1.67×106 | |
| 增长率/% | —38.27 | —32.92 | —54.11 | —21.77 | —36.18 | —31.20 | —50.95 | —17.61 | |
4 结论
本文考虑锚泊系统经济性能、安全性能和定位性能这3个重要指标,基于锚泊系统静力分析程序和遗传算法,提出了锚泊系统优化设计方法,开发了相应的智能优化设计程序。并以某项目中针对中国南海海域50 m水深设计的15 MW大功率漂浮式风机为研究对象,建立时域全耦合数值模型,对其锚泊系统进行优化设计。主要得出以下结论:
1) 结合锚泊系统静力分析程序和遗传算法编写的锚泊系统智能优化设计程序,能够很好地实现满足工程需求的锚泊系统优化目标,解决锚泊设计过程中复杂的多目标、多变量问题,节省了时间成本和计算资源。
2) 考虑锚泊线和锚固基础的建造和安装成本,锚泊系统优化方案的经济成本比原方案降低了17%,经济性能提升显著。
3) 优化方案的纵荡和横荡阻尼分别比原方案增大了69.30%和21.43%,有利于减小漂浮式风机系统水平运动,从而减小锚泊张力极值。
4) 在本文的优化案例中,锚泊系统优化方案使漂浮式风机平台在额定风速下的最大纵摇角减小了10.28%,有利于提高风机的发电效率;同时,优化方案的锚泊线安全系数较原方案增大16.36%,提高了锚泊系统在工作工况下的安全性能。极端工况下,优化方案和原方案都满足设计要求,水平运动幅值吻合较好。破断工况下,优化方案中的漂浮式风机纵荡和纵摇运动幅值均减小,并且锚泊线安全系数最多提升了9.61%,显著降低了锚泊系统在故障工况中的走锚风险,性能优化显著。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}