

轮毂电机的冷却是实现其高转矩密度的关键因素[7-9]。针对短时高过载的应用需求,液体冷却具有流-固界面的高对流换热系数和冷却液的高比热特性,是一种典型的轮毂电机高性能散热方法[10-12]。由于轮毂电机与汽车轮毂直接集成,因此轮毂电机及其液体冷却系统比集中驱动系统更直接受到路面颠簸的影响[13-14]。除了路面微小形变导致的高频小振幅的振动以外,路面起伏则会在轮毂电机液体冷却系统中产生低频大振幅的颠簸运动[15-16]。一般来说,高频小振幅的振动频率可分布在10~1 000 Hz的较宽频率范围内,振幅通常小于1 mm[17-18];而低频大振幅的颠簸运动频率通常不超过2 Hz,而振幅可达数厘米。虽然轮胎的形变可以有效减小路面微小形状的影响[19-21],但是低频大振幅的颠簸运动会导致轮毂电机及冷却系统的竖直方向加速度产生明显变化,进而改变冷却系统中的流体状态,且对轮毂电机的散热性能产生影响。
为了分析和评估颠簸运动对轮毂电机冷却回路中流体状态和冷却性能的影响,本文通过冷却回路的流体理论分析、热-流耦合仿真分析和实验测试开展研究。由于轮毂电机的颠簸运动暂态是一个涉及电磁-热-流体多物理场耦合的复杂过程,因此需要有效的多物理场建模与仿真方法,并进行实验验证和对比研究。颠簸运动特性较为复杂,需要针对性的颠簸运动抽象方法,在合理简化和抽象的前提下对颠簸运动的流体过程进行研究,本文参考汽车试验场的具体道路标准[29],采用正弦路面及正弦位移的形式定义颠簸运动。进一步,基于Navier-Stokes(N-S)方程进行流体理论分析,引入与竖直方向运动相关的附加力,评估颠簸过程中的冷却回路流量变化。针对一种实际的轮毂电机液体冷却回路,本文采用CFD方法对暂态颠簸过程中的流量变化进行仿真研究;特别的,本文针对轮毂电机的全冷却回路流体过程进行理论建模,并在仿真中采用了一维(1-D)-三维(3-D) 流体耦合方法,实现了轮毂电机水套外围回路的管道流等效和简化,有效减小了CFD仿真的建模复杂度。针对一台3.91 kW的轮毂电机样机及附属液体冷却系统,本文建立了轮毂电机的3-D热模型,并提出一种基于流体状态平均等效的热-流耦合仿真分析方法,通过对颠簸流体暂态进行周期平均,并与稳态热过程进行耦合,从而省略了暂态热-流耦合过程的高耗时计算。基于已有的颠簸运动物理模拟平台,设计并搭建了轮毂电机的实验冷却回路,并实验测试颠簸运动下冷却回路流量变化和轮毂电机内部温度变化过程,从而验证本文中理论和仿真分析的有效性和准确性。
1 颠簸运动中流体过程的理论分析
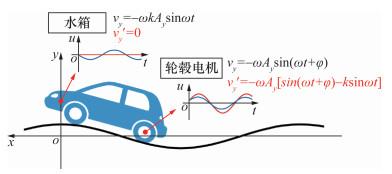
在颠簸运动过程中,车辆各处的运动状态需要基于路面轮廓加以定义。在实际情况中,路面的高频小振幅微小形变会被轮胎有效过滤,但低频大振幅起伏无法被过滤[20]。此时,通过正弦路面定义车辆各处的竖直方向位移,并计算其相应的竖直方向速度和加速度。基于所定义的正弦颠簸运动,可以进一步采用N-S方程对冷却回路的流体状态进行理论描述,并评估竖直方向加速度变化对冷却回路流量的影响。
1.1 正弦路面及颠簸运动定义
本文根据测试道路的相关标准[29]和比亚迪在中国深圳建造的典型正弦路面,提取其波长和振幅参数,定义车辆各点的颠簸运动,并进一步计算与水箱的相对运动。
正弦路面的竖直方向位移定义为
其中:Ay和λx分别为正弦路面的竖直方向振幅和水平方向波长,x为路面延伸方向上的水平方向位移。
基于上述正弦路面,颠簸运动频率由电动汽车的水平方向速度决定。对于恒定的水平速度vx,有
其中:t为颠簸的时间;f为颠簸运动频率,f=vx/λx;ω为角频率,ω=2πf。由此,竖直方向速度vy和加速度ay为:
基于上述分析,由于路面的振幅和波长固定,车辆各点的竖直方向运动由车辆水平速度确定。
车辆各点颠簸运动的速度分布见图 1,其中u表示各处的速度矢量。
1.2 颠簸运动下冷却回路的理论模型
为了分析颠簸运动下冷却回路的内部流体过程,需要给出颠簸工况的运动边界条件和平稳工况的固定边界条件,并将动边界条件等效为固定边界条件和N-S方程中的附加力,以此为基础分析颠簸运动下的流量变化。在本文的理论分析和后续仿真中,为了简化分析和建模,做出以下假设:1) 忽略管道的弯曲和颠簸运动过程中的形变,不考虑其由于颠簸运动激励引发共振的情况;2) 由于外部回路中流体为层流状态,可以采用Hagen-Poiseuille方程[31]进行解析建模,不考虑外部回路中管壁粗糙度对流体状态的影响。
采用N-S方程描述颠簸运动下冷却回路中流体运行状态为
其中:p为压力,g为流体所受外力(即重力),ρ为流体密度,μ为流体动力黏度;D表示求随体导数。
在平稳工况下,壁面Ω处的边界条件为
在颠簸工况下,壁面处的边界条件为
其中:v′y为壁面的颠簸运动速度;对于正弦路面,v′y由式(1)给出。
N-S方程的动边界条件可以等效为固定边界条件及附加力的综合作用。将各处流体相对于壁面的速度u′=u-v′y代入式(2)中,可得
其中引入的与加速度相关的附加力$ \widetilde{\boldsymbol{g}}$ 为
此时,壁面处的边界条件为
为了研究颠簸运动对冷却回路流量的影响,采用1-D流动方程进行分析,直接获得$ \widetilde{\boldsymbol{g}}$ 与流量Q的关系,而忽略截面实际流速分布。
描述管道的流量特性的1-D流动方程[34]为
其中:ΔPi表示第i段管道的进出口截面间的压力差,Ei(Q)表示第i段管道中泵提供的压力升高,fi(Q)表示第i段管道的摩擦压力损失,mi表示第i段管道管道内部流体的等效惯性,Δui2表示第i段管道进出口截面的速度平方差。
由于颠簸运动下流体受到$ \widetilde{g}$ ,因此式(3)中出现了额外的积分项$ \int_{i} \rho \widetilde{g} \mathrm{~d} h$ 。将式(3)对冷却回路的所有部分求和,可得
由于流体压力和速度的连续性,回路的1-D流动方程为
其中:E(Q)表示泵提供的总压力升高,f(Q)表示总摩擦压力损失,m表示总流体惯性,G表示额外的等效回路驱动力。
回路的各个特性定义为
由于常压下冷却介质近似不可压缩状态,此时局部附加力对全回路流体产生影响,因此需要考察全回路的附加力对流体运动状态的共同作用,因此式(4)中通过对全回路积分,引入G。
1.3 等效回路驱动力对冷却回路流量的影响分析
基于冷却回路的1-D流动方程,分析在正弦路面这一典型路面下,颠簸运动对Q和壁面对流换热系数的影响。
在平稳工况下,G为0,定义此时回路稳态流量为q0,由式(4)有
在正弦路面的颠簸运动中,由于冷却回路各点的$ \widetilde{g}$ 为频率相同,而幅值和相位不同的正弦函数,因此G也是具有相同频率的正弦函数。G的幅值和回路实际结构有关。定义G的幅值为ε,即
在G的作用下,冷却回路内流体受到扰动,时刻t时瞬态流量为Q(t, ε)。
采用渐进分析方法,将Q(t, ε)对ε渐进展开至二阶,有
Q(t, 0)为ε=0时的瞬时流量,即稳态流量q0;$ \frac{\partial Q}{\partial \varepsilon}(t, 0)$ 记为$ Q_{1}(t) ; \frac{\partial^{2} Q}{\partial \varepsilon^{2}}(t, 0)$ 记为Q2(t);则式(6)可写为
将Q(t, ε)代入式(4)中,可得
再将式(7)代入式(8)中,可得
在式(9)中,对其左侧的E和f在q0处进行Taylor展开,并比较其左侧和右侧的常数项、一阶项和二阶项形式,可以得到Q(t, ε)各项为
其中:
综上所述,Q(t, ε)的渐进级数解为
由于摩擦压力损失曲线一般为上凹,泵的流量-压力特征曲线一般为上凸[34],即f″>0且E″ < 0,此时K2>0。由此可见,在颠簸运动中,冷却回路的流量存在幅值为εK1、频率与颠簸运动相同的波动,并且其平均值降低ε2K2。
进一步,流量平均值的下降将导致对流换热系数降低,以及电机水套内流体的平均温度升高。因此,颠簸运动将对液体冷却系统的散热性能会产生影响,进而影响轮毂电机内部的温度分布。
2 颠簸运动下轮毂电机液体冷却系统的热-流耦合分析
基于理论分析结果,本文进一步对液体冷却系统进行建模和仿真,以研究颠簸运动对回路流量的影响。通过将竖直方向的加速度变化纳入流体模型,可以仿真分析颠簸运动对流体状态和回路流量的影响。此外,考虑热过程和流体过程的不同时间常数,设计热-流耦合迭代过程,可以通过热-流耦合仿真得到颠簸运动下轮毂电机内部的温度分布,从而评估颠簸运动对液体冷却系统散热性能的影响。
2.1 电动汽车中轮毂电机的液体冷却系统
针对冷却回路的代表性结构,采用“水箱—泵—轮毂电机—连接管道”的简化回路的形式进行研究,而忽略连接管道的实际结构,如图 2a所示,并基于简化回路结构分析G的形式。
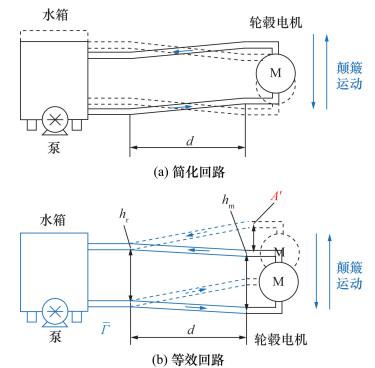
根据式(1),可以得到图 2b中,轮毂电机与水箱的相对振幅为
根据式(5),对图 2b所示的回路进行积分,可得
其中:hr为水箱入水口相对于出水口的高度差,hm为轮毂电机水套出水口相对于入水口的高度差。
因此,G的幅值与路面振幅、颠簸运动频率和冷却回路结构有关。视回路结构不同,A′可能取0~2Ay。在后续的仿真和实验中,作为一个特例,取A′=Ay。
2.2 一维流体冷却回路建模
对1-D拟合域进行理论分析,并得到3-D仿真域的进出口边界条件。定义轮毂电机进出口之间的压力差为P(t),在1-D拟合域中应用式(4),可得
其中: $\bar{E}(Q) $ 表示泵的流量-压力特性曲线,$ \bar{f}(Q)$ 表示管道的流量-压力损失特性,$ \bar{G}(t)$ 表示1-D拟合域的等效回路驱动力,$ \bar{m}$ 表示连接管道的等效惯性。
在目标流量Q=1 L/min附近,将$ \bar{E}(Q)$ 进行拟合,可得
利用Hagen-Poiseuille方程,对于目标流量Q=1 L/min,计算得到管道的Reynolds数为1 847,满足层流条件。可得
在层流条件下,${\bar m}$通过管道内的流速场分布获得
其中:u为1-D管道内部速度标量,umean为1-D管道截面的平均速度,${\bar A}$为管道截面。
将式(11)—(14)应用于式(10),可以得到轮毂电机水套进出口之间的压力差与流量之间的关系。
2.3 轮毂电机水套的流体过程建模
对于直径较大、厚度较小的扁平中空型轮毂电机,定子水套通常采用周向水道配置。具体而言,周向水道通常以平行或H形结构排列,在相邻水道之间插入切口以进行流动方向切换,如图 4所示。在切口处,流速和压力发生了显著变化,进入下一层水道后,2个分支的流量由各自的流阻决定。
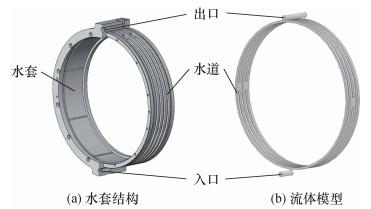
为了分析稳态和瞬态条件下的流体动力学和传热过程,需要根据实际的水套结构建立3-D流体模型,并基于流体仿真计算壁面局部对流传热系数。
为了考虑瞬态过程中变加速度的影响,需要通过1-D拟合域和3-D仿真域的进出口边界的互相迭代不断更新边界条件。通过前2步即第(i—2)和(i—1)步的回路流量以及1-D拟合域的理论表达式,计算得到当前步即第i步的3-D仿真域进口压力,再进行当前步的3-D仿真并获得当前步的流量,并用于后续迭代。由第(i—2)和(i—1)步的流量,得到第i步的压力的迭代公式为
其中Δt为2个时间步的时间间隔。
2.4 轮毂电机内部的热过程建模
为了分析轮毂电机内部的热过程,本文建立轮毂电机的热全模型,从而考虑水套中的流体温度分布对散热特性的影响。所研究的轮毂电机样机的基本结构和热全模型如图 5所示。
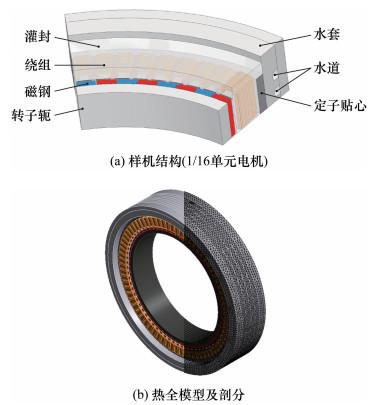
在轮毂电机的仿真建模和后续分析中,目标轮毂电机样机参数如表 2所示。
表 2 轮毂电机样机参数 |
| 参数 | 含义 | 数值 |
| Din/mm | 电机内径 | 224 |
| Dout/mm | 电机外径 | 300 |
| lef/mm | 有效长度 | 50 |
| PN/kW | 额定功率 | 3.91 |
| nN/(r·min-1) | 额定转速 | 300 |
| TN/Nm | 额定转矩 | 124.5 |
| IN/Arms | 额定电流 | 10.6 |
| pm | 极对数 | 32 |
| Qm | 槽数 | 72 |
轮毂电机内部的热交换过程主要包括固体内部的热传导、外表面与空气之间的对流传热、气隙中的对流传热和水套壁面上的对流传热。轮毂电机与空气之间的对流换热系数和气隙中的对流传热系数采用经验公式计算[7]。
2.5 轮毂电机的热-流耦合仿真分析
对于液体冷却的轮毂电机,其热时间常数通常为数分钟,而流体状态变化的频率取决于颠簸频率,此时轮毂电机的热时间常数远大于流体状态的变化周期。因此,在热-流耦合过程中,轮毂电机的热过程可以被视为稳态。通过将稳态热与暂态流体耦合,可以在考虑流体瞬态变化情况下分析轮毂电机的热分布,同时避免暂态热-流耦合的高耗时计算。
在热-流模型的界面处,分别分析每个模型的边界条件。对于热模型的对流换热边界,流体模型提供壁面对流换热系数和近壁面温度,用作热模型的对流换热系数和参考对流换热温度。对于流体模型的温度边界,热模型提供壁面温度,用作流体模型的参考壁面温度。
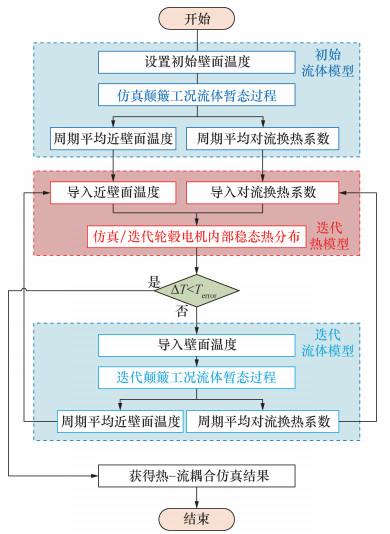
通过上述的热-流边界迭代方法,可以实现热模型和流体模型之间的双向耦合,所提出的颠簸运动热-流耦合分析的流程图如图 6所示,其中Terror为仿真残差限值。
2.6 仿真结果
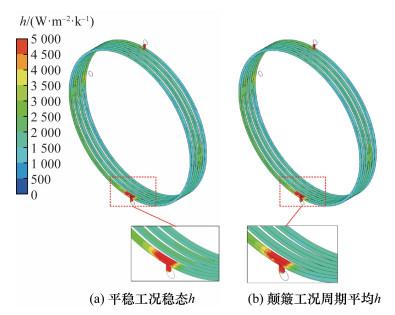
基于上述1-D/3-D流体耦合模型,轮毂电机水套水道内平稳工况和颠簸工况周期平均速度分布如图 7所示。
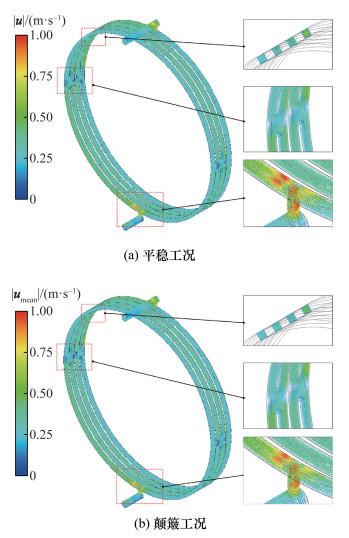
从CFD仿真结果中可见,在水道的充分发展段内,速度分布相对均匀且连续。而在进入和出口的弯头处,管道以90°改变方向,并且管道直径相对较窄,因此流速更快且方向变化剧烈。在2层水道的交汇处,流量在流体汇合后重新分配。综上所述,该样机水套水道的流体速度分布符合实际物理情况。由图 7局部速度分布和截面速度可见,颠簸工况的流体平均速度比平稳工况的有一定降低。
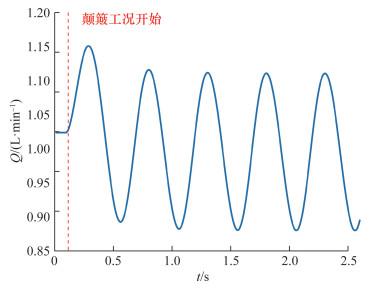
在颠簸工况下,冷却回路的流量变化如图 8所示。在仿真中,0~0.1 s的时间段为平稳状态,0.1 s时开始颠簸运动。从仿真结果可见,在平稳工况下,回路稳态流量为1.025 L/min;在颠簸工况下,回路平均流量为0.986 L/min,比平稳工况减少了0.039 L/min(3.80%),流量波动频率与颠簸频率相同,峰峰值为0.231 L/min(平稳工况稳态流量的23.2%)。
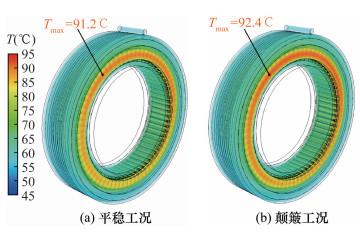
通过热-流耦合仿真获得平稳工况和颠簸工况的轮毂电机内部的稳态热分布,如图 10所示。仿真得到平稳和颠簸工况的电机内部最高温度Tmax分别为91.2 ℃和92.4 ℃,后者比前者提高了1.2 ℃(2.52%)。
综合上述仿真分析结果可见颠簸工况下,冷却回路暂态流量波动频率与颠簸频率相同,变化范围为±11.6%;并且平均流量和平均对流换热系数具有一定幅度的下降(分别为-3.8%和-4.7%),与理论分析的结论一致;然而,由于平均流量变化较小,颠簸运动对液体冷却系统散热性能影响有限(2.52%)。
3 实验测试
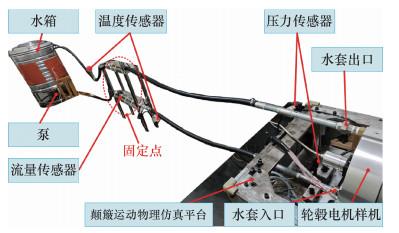
为了对轮毂电机在颠簸工况下的散热性能和流体回路的流量波动进行实验测试,本文基于已有的颠簸运动物理模拟平台,搭建了轮毂电机的液体冷却系统。
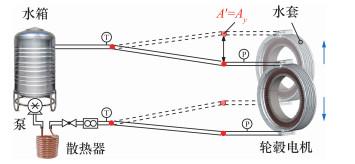
3.1 轮毂电机的液体冷却系统
轮毂电机的典型冷却回路如图 11所示。回路中包括轮毂电机样机水套、压力传感器、温度传感器、流量传感器、散热器和水箱。轮毂电机样机被置于颠簸运动物理模拟平台上,用于模拟竖直方向的颠簸运动。
3.2 实验结果
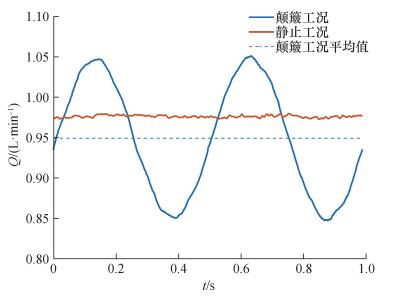
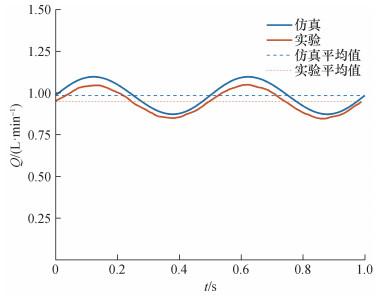
在平稳工况和颠簸工况下,回路流量曲线的实验测试结果如图 12所示。由实验结果可见,在平稳工况下的稳态流量为0.976 L/min;在颠簸工况下的平均流量为0.949 L/min,降低了2.7%,且暂态流量波动的峰峰值为0.197 L/min(20.8%)。
颠簸工况下回路流量曲线的仿真和实验结果对比如图 13所示。与仿真结果相比,实验流量波动降低13.1%,流量平均值降低3.75%。上述差异主要归因于实验流体回路与仿真之间的不完美匹配和流体CFD数值仿真的固有误差:1) 在外部流体回路建模中,采用泵的流量-压力静态特性曲线模拟泵的动态特性,虽然泵的动态特性不是颠簸运动下决定流体状态变化的主要因素,但是对实际的流量会产生影响,由此导致仿真与实验的有限的数值偏差;2) 采用Hagen-Poiseuille方程对管道特性进行1-D拟合,理论解析值与实际情况可能存在一定偏差;3) 流体CFD仿真存在固有误差。本文仿真和实验分析的主要目的是验证瞬时流量波动及流量平均值变化的趋势,上述误差不影响本文的研究结论。
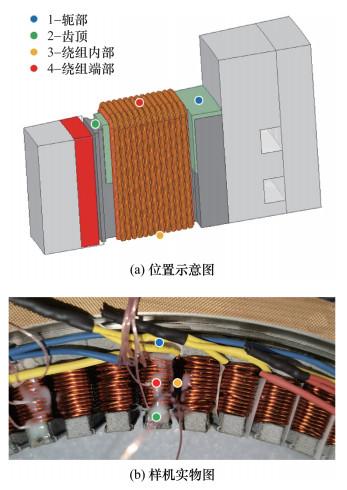
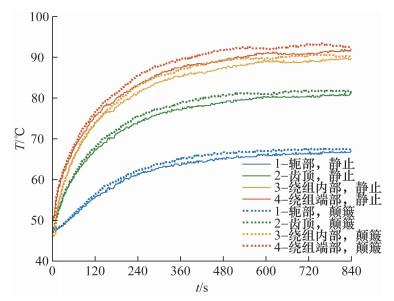
仿真和实验中各个位置的稳态温度分布结果如表 3所示。可以看出,仿真与实验结果中,热模型的温度梯度分布情况一致;在电机内部温度最高点处即4-绕组端部,颠簸和平稳工况下的温度差仿真值和实验值分别为1.2 ℃和1.1 ℃,由此可以验证仿真方法的有效性和仿真结果的准确性。
表 3 轮毂电机内部温度仿真与实验结果对比 |
| 位置 | 平稳工况温度/℃ | 颠簸工况温度/℃ | |||
| 仿真 | 实验 | 仿真 | 实验 | ||
| 1-轭部 | 65.8 | 66.2 | 67.0 | 67.4 | |
| 2-齿顶 | 80.4 | 80.9 | 81.6 | 82.0 | |
| 3-绕组内部 | 88.8 | 89.5 | 90.0 | 90.6 | |
| 4-绕组端部 | 91.0 | 91.7 | 92.2 | 92.8 | |
4 颠簸运动暂态对轮毂电机温升影响分析
当轮毂电机和冷却回路处于颠簸运动暂态时,根据推导,冷却回路流量会存在平均流量的降低和与颠簸频率相同的瞬时流量的波动。此时,颠簸运动特性改变,以及平稳工况稳态流量变化,均会对颠簸工况的瞬时流量波动、平均流量和流体壁面温升变化产生影响,本文分别通过流体仿真和热-流耦合仿真,讨论上述因素导致流体状态改变,从而对水套中流体壁面换热的影响。
4.1 颠簸运动振幅
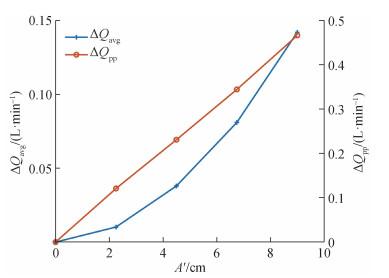
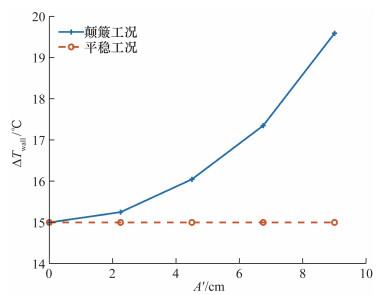
由仿真结果可见,当颠簸运动振幅增大时,瞬时流量波动峰值与平均流量下降值均增大,与此同时轮毂电机的壁面暂态温升大幅增大。
4.2 颠簸运动频率
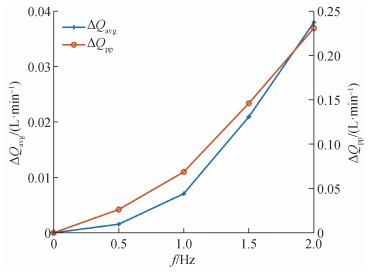
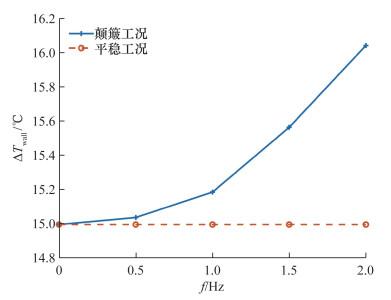
由仿真结果可见,当颠簸运动频率增大时,瞬时流量波动峰值与平均流量下降值均增大,与此同时轮毂电机的壁面暂态温升大幅增大。
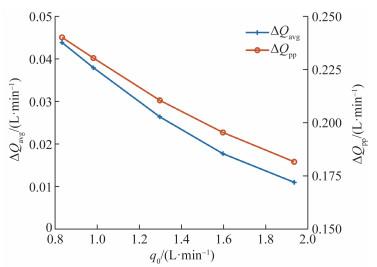
4.3 冷却回路流量
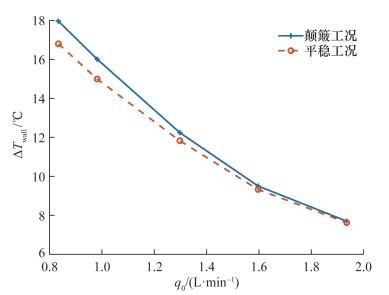
5 结论
本文通过理论分析、仿真分析和实验测试,研究了颠簸运动对轮毂电机液体冷却性能的影响。
在理论分析中,采用正弦路面定义了颠簸运动。通过在N-S方程中引入竖直方向加速度变化导致的附加力,评估了颠簸运动对冷却回路流量的影响。结果表明,颠簸运动会导致流量瞬时值波动和平均值下降,进而影响轮毂电机的散热特性。
在仿真分析中,建立了轮毂电机的热模型和水套的流体模型,并通过热-流耦合方法研究轮毂电机在颠簸运动中的热特性变化。在流体仿真中,将3-D CFD仿真域与1-D流动拟合域耦合,分析颠簸运动中水套流速分布和流量变化。在热-流耦合仿真中,分析平稳工况和颠簸工况下的轮毂电机内部温度分布。结果表明,颠簸运动会导致回路流量瞬时值明显波动和流量平均值下降,从而导致轮毂电机内部温度小幅升高。
在实验测试中,基于颠簸运动物理模拟平台,进一步搭建了轮毂电机的实验液体冷却系统,用于测试平稳工况和颠簸工况下的流体状态变化和温度分布。采用流量和温度传感器分别测量回路流量变化和轮毂电机内部温度分布。结果表明,实验结果与仿真结果的趋势一致,由此验证了理论分析和仿真分析的有效性。
基于热-流耦合方法,进一步通过仿真分析了颠簸幅值、颠簸频率和稳态流量对颠簸运动的瞬时流量波动峰值、平均流量下降值和温升变化的影响。
综上所述,在颠簸运动过程中,轮毂电机液体冷却系统的流量波动频率与颠簸频率相同且波动较大,但流量平均值仅略有下降,导致轮毂电机内部温度仅小幅度升高。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}