

一个完整的自适应结构包括传感器、计算机和作动器,集成在原主体结构中,可感知环境的变化,并能调节自身形态或刚度[4]。主动控制思想最早出现在古埃及时期,Yao[5]将该思想带入土木工程行业,并利用此方法对高层建筑进行加固,以抵抗暴风。与传统结构相比,索杆结构更轻盈,主动控制的效率更高,更易实现,因此,关于结构主动控制的探索和研究主要集中在索杆结构。Warnitchai等[6]对使用拉索控制的斜拉桥进行了研究,发现主动控制在减小桥梁变形幅值方面作用明显。Senatore等[7]设计了一种装有可控撑杆的空间网架悬臂结构,可通过控制撑杆长度实现静载和行人作用下的无限刚度。Kmet等[8]将肋环型索穹顶中心压杆替换为液压作动装置,通过长度调整,对索穹顶的形态进行调整。梁笑天[9]对肋环人字形索穹顶进行了主动控制试验,通过改变索的长度,实现结构几何形状和内力分布的调整。Zhang等[10]设计了一种通过中心压杆控制的葵花型索穹顶结构,分别以位移和内力为目标,进行优化控制研究,并进行相应的模型试验。应萧远[11]以作动杆代替弦支穹顶中的撑杆,综合考虑结构的位移和应变能,建立了多目标控制模型;宫鹏飞[12]设计了一个自适应肋环型索穹顶主动控制模型,该模型中的杆和索均可作为控制手段。
形状记忆合金(shape memory alloy,SMA)是一种智能材料,具有独特的性能,如形状记忆性能(shape memory effect,SME)和超弹性(superelasticity,SE),受到许多学者和工程师的青睐[13]。形状记忆性能指SMA在马氏体态下产生一定的塑性变形,在外界刺激下消除残余应变的能力。而当边界条件不变时,刺激SMA便会产生一定的回复力或回复变形,因而在很多领域中,SMA被用作主动控制的驱动器。文[14-15]利用SMA拉索对索网天线进行调整,杨天夫等[16]研制了一种SMA差动弹簧驱动的机械手。在土木工程中,SMA常被用来闭合混凝土裂缝和调节结构预应力:Czaderski等[17]在混凝土梁中预埋SMA钢带,当混凝土出现裂缝时,可通过加热SMA闭合裂缝;dos Santos等[18]将SMA丝作为张弦梁桥的拉索,通过电流加热改变索的弹性模量,从而改变结构的自振频率,以避免共振;Liu等[19]研制了铁基SMA钢绞线,并应用于混凝土箱梁腹板,当腹板出现竖向预应力损失或开裂时,通过加热SMA钢绞线,可弥补预应力的损失,并修复裂缝;Fritsch等[20]将铁基SMA固定在钢梁下端,通过喷枪加热,可减小钢梁挠度。
综上所述, 调整索穹顶结构单元的长度可以控制结构内力和形态。然而, 现有的控制方法控制精度通常不易掌握, 且会增加结构的自重。SMA材料轻盈,驱动性能优异,操作简单,便于实现智能化,因此可用于索穹顶结构中,以实现对结构形态的控制。以此为目标,首先,本文对SMA丝进行单轴拉伸试验, 对材料性能进行测试;其次,在此基础上,设计可用于主动控制的SMA钢丝束,并对钢丝束进行单轴拉伸,研究其回复效果;再次,将SMA钢丝束引入索穹顶结构中,并进行结构的调控试验;最后,将试验结果与机械控制和有限元计算结果进行对比,验证SMA作为作动装置的有效性。
1 索穹顶结构模型
本文以索穹顶结构为研究对象,对葵花型索穹顶结构模型、测量方式和索穹顶结构有限元模型进行介绍。
1.1 葵花型索穹顶结构模型
本文讨论的模型为跨度3.39 m的葵花型索穹顶,结构如图 1所示。其中:编号WXS、WJS、HS、NXS和NJS依次代表外斜索、外脊索、环索、内斜索和内脊索;编号W和Z依次代表外节点和内节点。索的初始预应力如下:外斜索105 MPa、外脊索100 MPa、内斜索和内脊索均为65 MPa、环索为120 MPa。
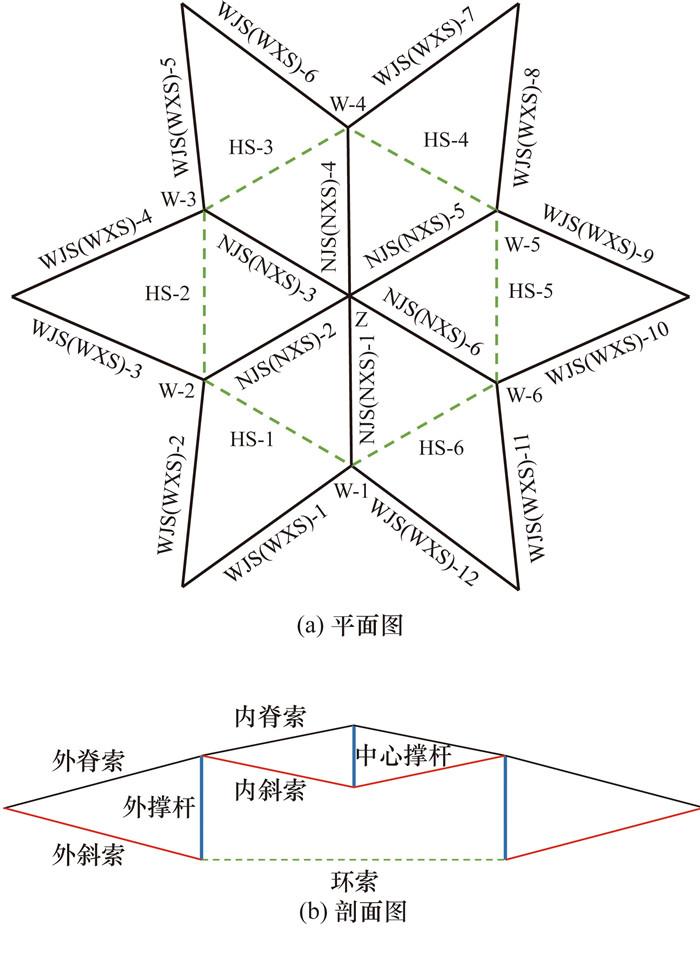
本文试验中的索为直径5.00 mm的抗扭钢丝绳,弹性模量为110 GPa,破坏荷载为20 kN。为使钢丝绳的长度可调整,本文采用文[14]中设计的可调节索单元。试验的加载位置为各撑杆的下节点, 并通过悬挂沙袋的方式进行加载, 其中:外撑杆下节点处沙袋质量为26.5 kg, 内撑杆下节点处沙袋质量为20.5 kg。
1.2 测量方式
利用蚌埠高精传感系统工程有限公司生产的GJBLS-1型拉压力传感器测量拉索内力,该传感器两端带有螺栓孔,可连接制索单元。
利用溧阳市铭源仪器厂生产的YWC型应变式位移计传感器测量位移,测点位于各节点下部。
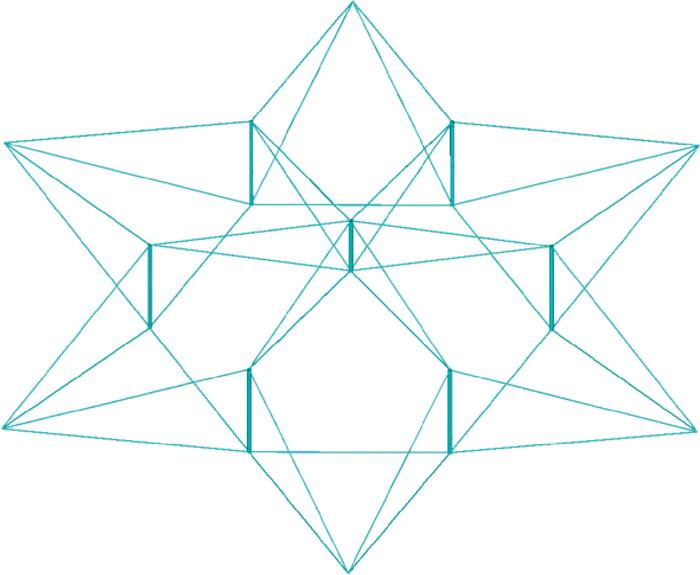
1.3 索穹顶结构有限元模型
2 SMA控制单元
通常情况下,SMA有2种晶体结构,即高温下的奥氏体相和低温下的马氏体相。记忆效应是应力场和温度场耦合的结果,具体为在低温马氏体时,SMA在外力作用下发生塑性变形,当温度高于某一临界温度时,SMA发生马氏体逆相变,成为奥氏体,塑性变形消除[21]。
2.1 SMA钢丝
本文所用到的SMA丝的直径为1 mm,马氏体逆相变的初始温度为40 ℃,结束温度为100 ℃。
本文开展了SMA钢丝的单轴拉伸试验。试验中, 为研究不同温度下钢丝的拉伸性能, 本文用恒温箱加热钢丝。试验中的SMA丝的长度为20 cm,试验温度分别为20和100 ℃,以变形为控制方法,加载速率为2 mm/min,拉伸变形至10.00%,即2 cm时停止拉伸,试验结果如图 3所示,图中标示数据为材料屈服强度。
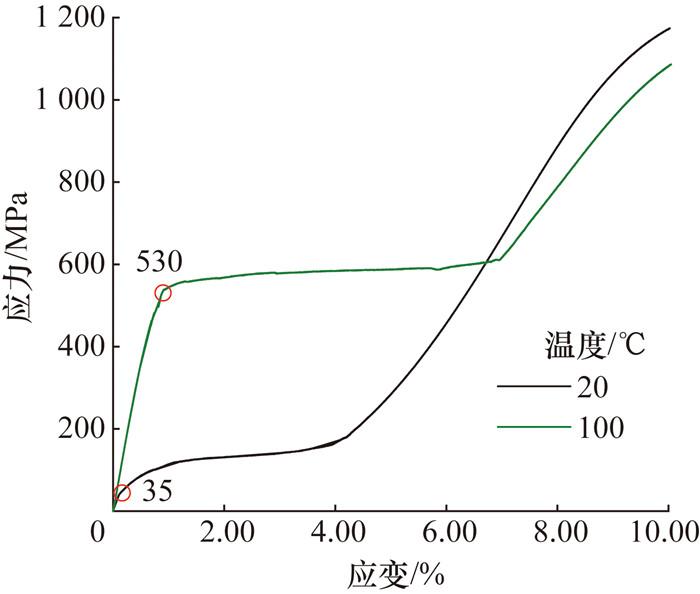
由图 3可知,本文使用的SMA丝在常温下为纯马氏体相,弹性模量为37 GPa,屈服强度为35 MPa,随着温度升高,材料逐渐发生逆相变,当温度达到100 ℃时,完全变为奥氏体,此时,弹性模量增至70 GPa,屈服强度为530 MPa。
2.2 SMA钢丝束
在索穹顶的位移控制中,斜索是主要的控制索。本文先将SMA制成钢丝束, 然后与钢丝绳进行串联, 得到适用于索穹顶结构索单元的主动控制单元。为使钢丝束发挥回复作用, 需要在加载过程中进入塑性阶段。
2.2.1 钢丝束设计
本文对SMA钢丝束的截面进行了设计。根据有限元模型,在预应力和重力作用下,外斜索内力为2 175 N,应力为111 MPa;内斜索内力为1 254 N,应力为65 MPa。在荷载后,外斜索拉力为2 440 N,应力为124 MPa;内斜索内力为1 140 N,应力为58 MPa。而根据2.1节中的试验结果,SMA丝在常温下的单轴拉伸屈服强度为35 MPa。若SMA钢丝束的总面积与钢丝绳相同,则索穹顶结构成型时,SMA钢丝束已进入塑性阶段,外斜索的塑性应变为0.98%;施加荷载后,外斜索的塑性应变为1.82%。由文[22]可知,当应变小于8.00%时,控制效果最佳,因此,SMA钢丝束的总面积可与钢丝绳相同。根据有限元模型模拟结果,钢丝绳的调控长度小于2 mm,因此为保证SMA钢丝束可以有效地发挥作用,钢丝束的长度宜为15~20 cm。
2.2.2 钢丝束制作
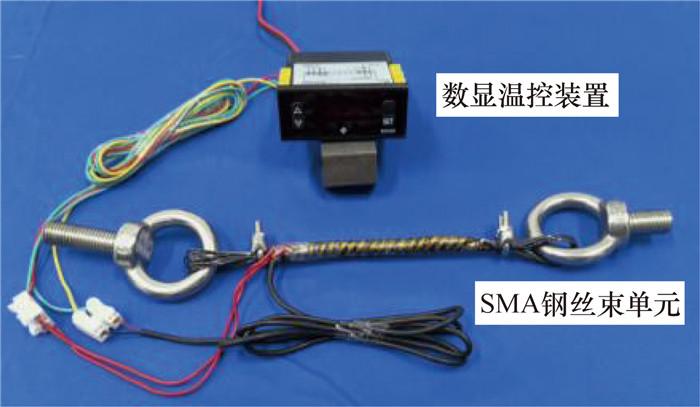
一方面,本文使用的SMA钢丝束由多根钢丝组成,整体直径较大;另一方面,通电加热的效率较低,热风枪和喷火枪加热的温度无法精确控制。然而,电热膜是一种柔性薄膜,可包裹在钢丝束外,能通过数显温控装置精确控制温度,因此本文使用聚酰亚胺电热膜加热SMA钢丝束。
安装温控装置的SMA钢丝束单元如图 4所示。首先,为方便与原钢丝绳进行连接,在SMA钢丝束两端设置带螺杆的吊环,将SMA钢丝通过吊环缠绕,形成钢丝束;其次,为使钢丝更均匀地发挥作用,采用“8”字形缠绕方式,在端部使用卡扣固定;再次,在钢丝束中加入温度传感器,并在外围缠绕粘贴一层聚酰亚胺加热膜;最后,使用配套的数显温控装置对加热膜温度进行控制。
2.2.3 钢丝束性能试验
对制成的SMA钢丝束进行单轴拉伸试验,试验装置如图 5所示。使用试验机自带的测量系统输出两端加载装置的荷载和位移,表示钢丝束的内力和变形。

试验过程如下:首先,将SMA钢丝束拉伸至初始荷载;其次,保持荷载不变;最后,对钢丝束进行加热。钢丝束的加热过程如下:每次升温10 ℃,持荷1~3 min,直至荷载和位移稳定,输出荷载和位移,得到钢丝束在不同初始荷载下的回复应变。由有限元模型模拟结果可知,索穹顶结构在预应力作用下,外斜索拉力约为2 100 N;在荷载作用下,外斜索拉力为2 400 N。因此试验中钢丝束的初始拉伸荷载分别为2 000、2 500和3 000N。
加载过程中,SMA钢丝束的应力应变曲线如图 6所示。钢丝束在拉伸前期属于拉紧阶段,所以应变增加较快,随着荷载增加,钢丝束逐根进入塑性阶段,因此整根钢丝束逐渐屈服,曲线中无明显屈服点。在达到初始荷载2 000、2 500和3 000 N时,钢丝束的应变分别为4.10%、4.54%和4.67%。

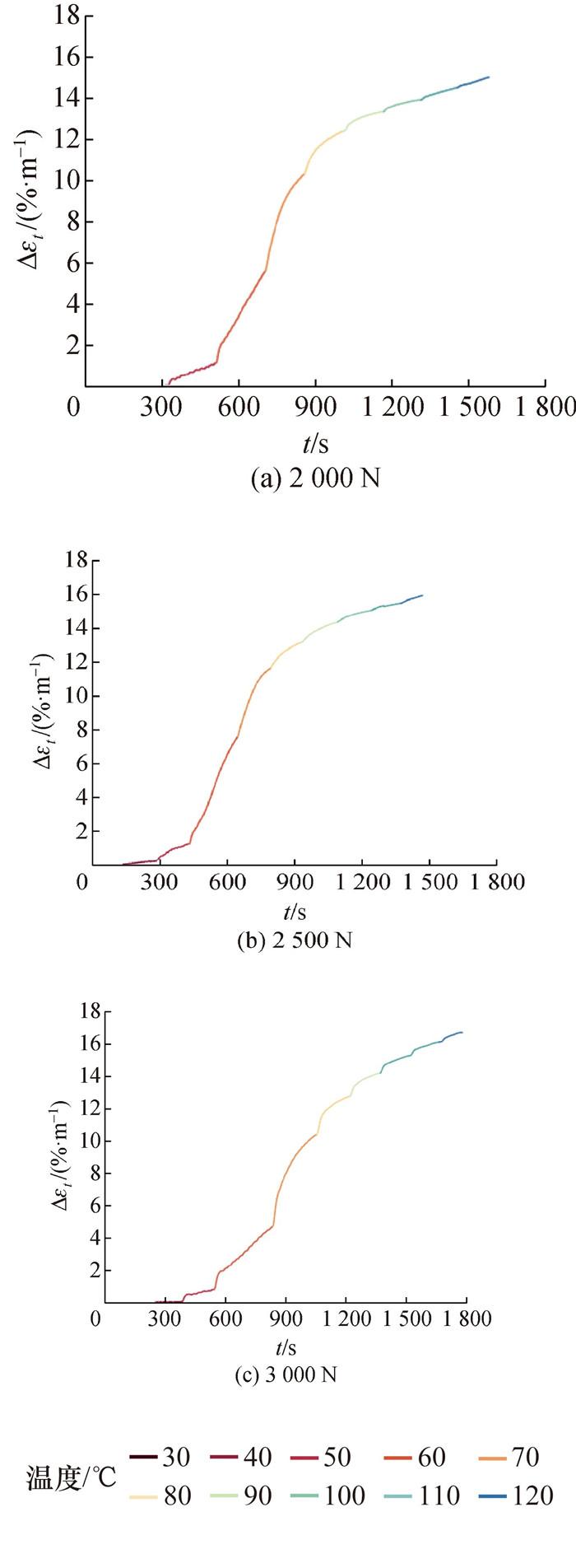
保持荷载不变,对SMA钢丝束进行加热,可测得SMA钢丝束的回复应变。由于试验中的钢丝束加热长度不同,因此可根据式Δεt=(ε0-εt)/lh得到单位加热长度的回复应变。其中:ε0为钢丝束初始荷载下的初始应变;εt为加热时间为t时的应变;lh为加热长度;Δεt为加热至时间t时单位加热长度下的回复应变。
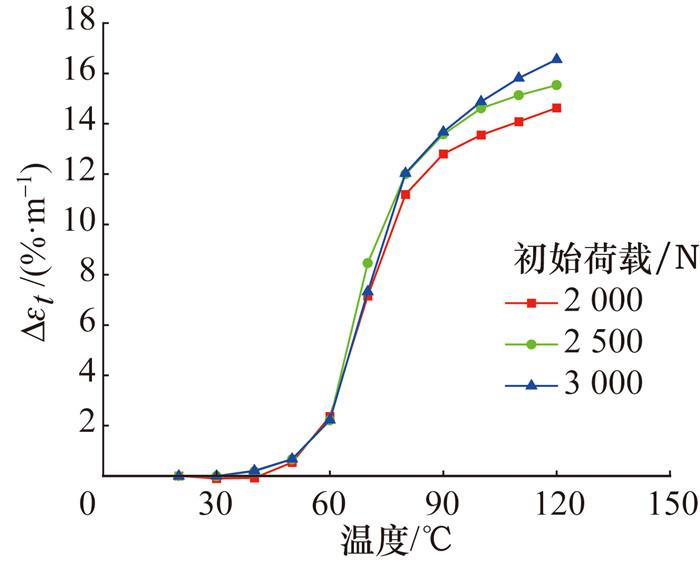
Δεt随加热时间的变化如图 7所示,同根曲线中的不同颜色表示不同温度的加热和持荷阶段。由于钢丝束有一定厚度,温度T由外向内传递,不同钢丝依次受热进入回复阶段,且在荷载不变时,位移会有波动,因此加热阶段回复应变呈阶梯状增长;在每次升温后,均需要在一定的持荷时间后,钢丝束的回复位移方可稳定下来。记录位移稳定后的回复应变,得到T-Δεt曲线,如图 8所示。在低温和高温时,即相变不久和即将结束前,回复应变增长较慢;而在中间温度,回复应变增长较快,这与SMA相变过程中马氏体相体积比的变化相关[16-23]。结合图 6和7可知,当初始荷载为2 000、2 500和3 000 N时,钢丝束的初始应变分别为4.10%、4.54%和4.67%。加热到120 ℃时,单位加热长度的回复应变分别为0.1462、0.1554和0.1655 m-1,表明不同的初始荷载和应变下,回复应变均不同,初始应变越大,回复应变也越大。
2.2.4 SMA-钢丝绳单元制作

3 索穹顶主动控制试验
3.1 试验模型
为验证SMA对索穹顶的控制效果,本文分别使用正反螺栓机械控制方法和SMA控制方法进行试验,试验模型如图 10所示。

3.2 结果与分析
本文对比分析了索穹顶结构的预应力态、荷载态、调控阶段的节点位移和单元内力的试验与模拟结果。
3.2.1 预应力态
在施加预应力后,利用拉力计测量各索的拉力。由于荷载具有对称性,因此本文仅展示各类型索的1和2号索力,如表 1所示。试验中各索的预应力相对误差最大为6.23%。
表 1 施加预应力后各索的索力 |
| 控制方法对比 | 索单元 | 有限元 | 机械控制方法 | 相对误差/% | SMA控制方法 | 相对误差/% |
| 索力/N | WXS-1 | 2 152.31 | 2 187.44 | 1.63 | 2 075.00 | 3.59 |
| WXS-2 | 2 155.66 | 2 108.20 | 2.20 | 2 080.80 | 3.47 | |
| WJS-1 | 2 112.78 | 2 208.06 | 4.51 | 2 142.58 | 1.41 | |
| WJS-2 | 2 114.24 | 2 217.60 | 4.89 | 2 146.39 | 1.52 | |
| HS-1 | 2 478.47 | 2 446.40 | 1.29 | 2 478.80 | 0.01 | |
| HS-2 | 2 476.72 | 2 354.93 | 4.92 | 2 394.00 | 3.34 | |
| NJS-1 | 1 239.65 | 1 254.07 | 1.16 | 1 284.72 | 3.64 | |
| NJS-2 | 1 241.48 | 1 216.78 | 1.99 | 1 164.15 | 6.23 | |
| NXS-1 | 1 229.53 | 1 227.20 | 0.19 | 1 155.60 | 6.01 | |
| NXS-2 | 1 226.72 | 1 197.78 | 2.36 | 1 162.22 | 5.26 |
3.2.2 荷载态
表 2 施加均布荷载后各索的索力和各节点的位移 |
| 控制方法对比 | 索单元 | 有限元 | 机械控制方法 | 相对误差/% | SMA控制方法 | 相对误差/% |
| 索力/N | WXS-1 | 2 438.41 | 2 304.96 | 5.47 | 2 405.64 | 1.34 |
| WXS-2 | 2 441.84 | 2 343.20 | 4.04 | 2 419.05 | 0.93 | |
| WJS-1 | 1 773.46 | 1 855.97 | 4.65 | 1 642.89 | 7.36 | |
| WJS-2 | 1 775.58 | 1 873.42 | 5.51 | 1 611.85 | 9.22 | |
| HS-1 | 2 807.23 | 2 689.20 | 4.20 | 2 825.32 | 0.64 | |
| HS-2 | 2 804.95 | 2 721.80 | 2.96 | 2 769.23 | 1.27 | |
| NJS-1 | 1 137.58 | 1 184.57 | 4.13 | 1 189.53 | 4.57 | |
| NJS-2 | 1 140.11 | 1 229.39 | 7.83 | 1 084.53 | 4.87 | |
| NXS-1 | 935.78 | 972.40 | 3.91 | 883.10 | 5.63 | |
| NXS-2 | 933.06 | 936.67 | 0.39 | 842.52 | 9.70 | |
| 位移/mm | 外圈节点 | 1.38 | 1.31 | 5.34 | 1.63 | 15.33 |
| 内圈节点 | 1.70 | 1.50 | 13.33 | 2.02 | 15.84 |
对比2种控制方式的索力和节点位移,发现在索中加入SMA钢丝束后,索力和位移的变化幅度均较大。结合索力可以发现,在施加荷载后,外斜索的应力约为123 MPa,SMA钢丝束已经进入塑性阶段,由于SMA的弹性模量较小,因此索的变形较大;而钢丝绳的弹性模量较大,且此时远没有达到弹性极限。这使得使用SMA钢丝束的索穹顶结构整体位移更大, 同时索力变化也更大。
3.2.3 调控阶段
在施加荷载后,索穹顶结构的节点向下移动,结构形态发生变化。对结构中外斜索长度进行调控,结构的内力和形态也会随之变化,从而实现对结构的控制试验。SMA钢丝束在加热后,回复应变与温度的关系如2.2.3节。使用机械控制方法时,需要通过手动扭转螺栓调整索的长度,而SMA控制方法只需通过图 4中的数显温控装置进行调整,更精确方便。
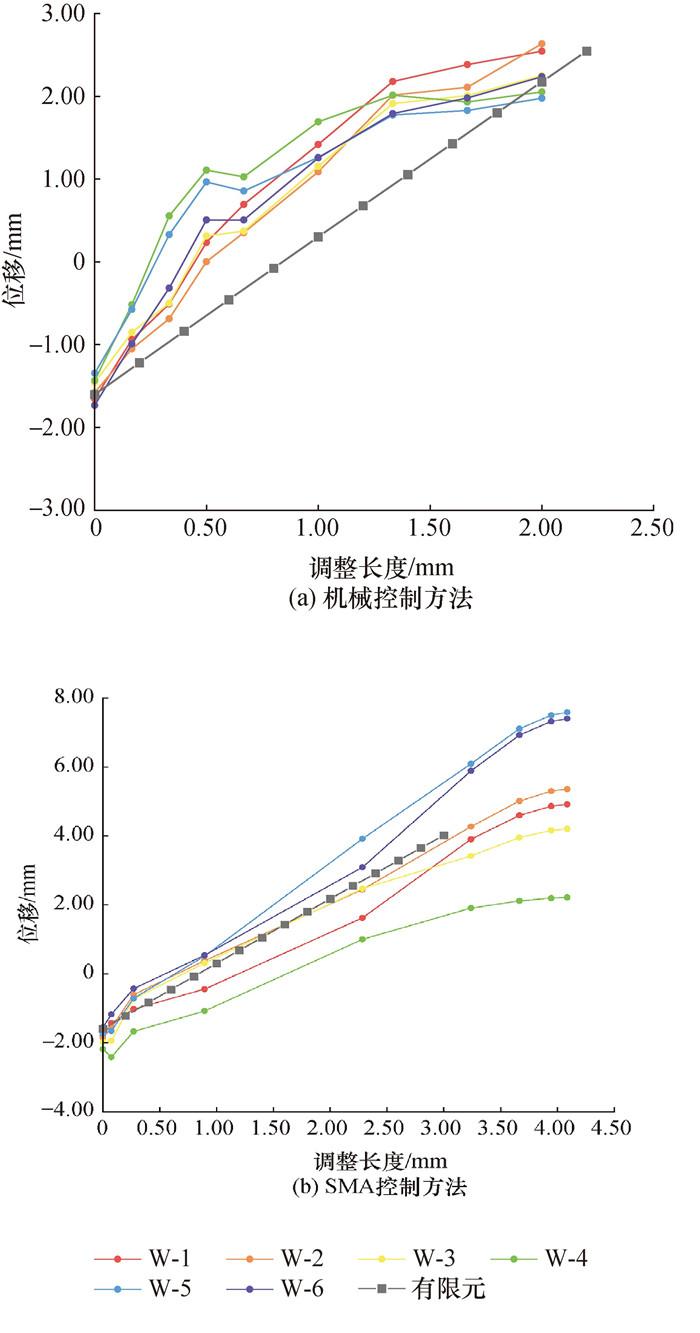
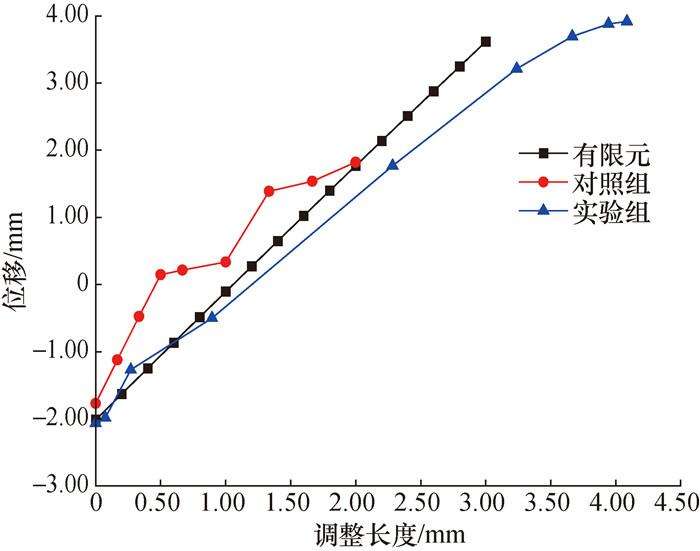
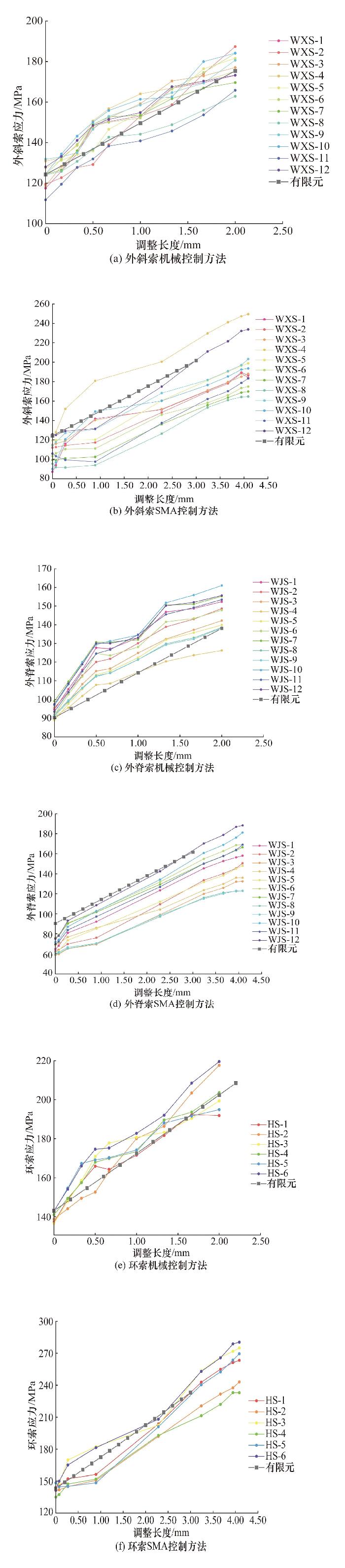
对比2种控制方法可知:使用机械控制方法时,位移和索力的变化速率与螺栓的手动旋转角度相关,精度不易控制;使用SMA控制方法时,位移和索力的变化随索长呈线性变化,变化较均匀。在SMA控制方法得到的曲线图中,单元内力和节点位移的变化并不均匀,结合图 8可以发现,结构位移和索力的变化速率与温度相关,在相变开始和结束的附近时,位移和应力变化较慢,在60~90 ℃之间,变化较快,这与SMA中马氏体体积含量相关。整体来看,节点位移和索力变化较均匀,说明SMA作为索的回复驱动装置,对索穹顶索力的控制方法稳定可靠。但在调控过程中,在每次加热到目标温度后,需保持一段时间(20~30 s),结构方可稳定,说明使用SMA控制时,具有一定的滞后性。
表 3 结构形态回复时节点位移和索力 |
| 控制方式 | 调整长度/mm | 节点位移/mm | 索力变化/% | ||||||
| 外节点 | 内节点 | 外斜索 | 外脊索 | 环索 | 内斜索 | 内脊索 | |||
| 机械控制 | -0.50 | 0.52 | 0.15 | 16.17 | 28.93 | 19.35 | 24.81 | 34.48 | |
| SMA控制 | -0.89 | 0.04 | -0.50 | 17.49 | 29.28 | 16.90 | 22.21 | 37.03 | |
| 有限元模拟 | -0.90 | 0.10 | -0.30 | 18.39 | 26.86 | 18.51 | 21.57 | 30.43 | |
4 结论
本文根据SMA丝的材料性能,首先设计了可以用于主动控制的SMA钢丝束;其次,对其回复性能进行了试验研究;最后,以葵花型索穹顶为例,验证了SMA作为主动控制装置的效果,主要结论如下:
1) 在索穹顶结构中,SMA控制方法和机械控制方法对结构的控制效果基本一致,表明SMA可以作为索穹顶主动控制的驱动器;有限元模拟得到的结构内力和位移变化趋势与2种控制方法得到的结果基本一致,数值误差与初始预应力有关,表明有限元模型可较好地对索穹顶结构的主动控制过程进行模拟。
2) 使用SMA控制时,可以使用温控装置对钢丝束的温度进行调控,从而实现索长度的调整。与机械控制方法相比,SMA控制方法更精确方便,但是在加热到目标温度后,只有保持一段时间,结构才能达到稳定,具有一定滞后性。
3) SMA的控制效率与温度有关,因此设计主动控制钢丝束时需要更为精细化的研究,充分考虑其回复能力和经济性。
4) 对于葵花型索穹顶来说,外斜索长度的调整可以使结构的形态得到恢复,同时也能缓解脊索的松弛现象。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}