

国内外诸多学者在泵阀联合调控方面进行了大量研究。Rezghi等[3]针对某电站甩负荷工况,确定了合理阀门关闭规律,有效降低了水泵水轮机倒转速和最大压力。Wang等[4]针对供水系统事故停泵工况,获得了水锤防护效果较好的泵-空气罐-阀相对位置方案。莫旭颖等[5]分析了单泵单管输水管线事故工况下出口阀门关闭规律对末端水锤的影响。丁梓恒等[6]针对加压输水与重力自流联合供水工程事故停泵工况,分段确定了泵站加压输水段及重力自流段的水锤防护方案,并结合两管段防护措施避免了高位水池溢流或漏空。Shi等[7]针对3个并联泵同时断电工况,研究了溢流水池及调节阀的联合防护措施,可减少水池的溢流量。然而,上述研究主要集中于泵站机组同时事故停机工况,对泵站连续停泵工况研究较少。但在实际工程中,连续停泵的不当操作可能对水锤的削弱产生反作用。同时,针对长距离复杂输水工程,多对管道采取分段研究策略,对于输水工程中的调蓄建筑物水位变化考虑不足,未能充分反映泵阀联合调控对系统整体的影响。
泵阀联合调控过程受多变量控制且参数间相互影响,采用传统的试算法虽可得到降低水锤的泵阀联合调控方案,但其耗时耗力,且存在人工参与度较高、过度依赖经验判断、水锤防护效果有待改进等不足,故需进行泵阀联合优化调控研究。智能优化算法的出现和发展,为解决包含泵阀联合调控问题在内的实际工程问题提供了有效手段。如遗传算法(genetic algorithm,GA)与粒子群算法(particle swarm optimization,PSO)等已成功应用于泵阀联合优化调控问题[8-9]。然而,各启发式算法均存在优缺点。因此,不断寻求优势算法或针对算法缺陷做出改进,成为求解泵阀联合优化调控模型的一种普遍诉求。浣熊优化算法(coati optimization algorithm,COA)[10]是受长鼻浣熊捕猎与逃脱的自然行为启发而提出的新型元启发式算法,与其他元启发式算法相比,COA具有进化能力强、收敛速度快、收敛精度高等优势,在力学响应[11]、短期电力市场系统[12]、电力系统[13]等领域已得到了良好应用。鉴于单目标COA所展现的优越性,已有学者将多目标浣熊优化算法应用于风电功率预测[14],配电网运行[15]以及变电工程造价[16]等多目标优化问题。不过,多目标浣熊优化算法尚未在水利工程,特别是水锤防护领域得到应用。
多目标优化问题所得的Pareto最优解集各目标间具有竞争关系,普遍存在难以决策的困难,因此,后续需对候选解集进行筛选以获得最终方案。常见的决策方法包括层次分析法(AHP)[17]、逼近理想解排序法(TOPSIS)[18]、主成分分析法(PCA)[19]等。其中,AHP决策快、所需数据量小,但其层次较多,计算过程易出现不一致现象; TOPSIS虽避免了数据选择的主观性,但权重向量的选取对最终结果影响较大; PCA虽可减少数据维度,降低计算复杂度,但其适用于线性数据。改进理想点法(IIPBD)[20]计算简便、应用灵活,决策客观,能够避免决策者人为偏向对方案排序的影响,常被用于解决决策分析类问题,如选址定容[20],电网调节[21]等。
基于此,本文以重力输水与加压输水相结合的长距离输水工程为研究对象,综合考虑最大水锤压力最小、最小水锤压力最大及高位水池水位波动最小等目标,建立了连续停泵工况下基于水力计算的泵阀联合优化调控模型,并应用了基于非支配排序的多目标浣熊优化算法(NSCOA)进行求解。此外,针对决策中存在的主观问题,采用IIPBD对Pareto解集进行优选。最后,以山东某长距离输水工程为例,研究了3台并联泵、3个泵后阀及末端阀的联合优化调控。以超体积指标(hypervolume,HV)和间距指标(spacing,SP)为评价指标,通过对比NSCOA与NSGA-Ⅱ、NSSA求解得到的Pareto前沿解,验证NSCOA在泵阀联合调控问题中寻优性能的优越性。在此基础上,采用IIPBD得到了较原方案压力、水位波动显著降低的决策方案,进一步提升长距离输水工程泵阀联合调控过程可靠性。
1 泵阀联合优化调控模型及求解方法
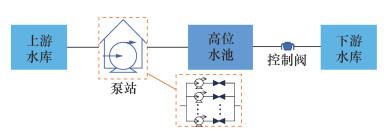
加压输水与重力输水相结合的复杂长距离输水工程通常由管道、泵站、阀门和高位水池组成。高位水池通常设于输水管道最高处,将输水工程分为加压输水段与重力输水段,其工程结构如图 1所示。
加压输水与重力输水相结合的复杂长距离输水工程泵阀联合优化调控需协调水泵停机间隔、泵后阀及末端阀关闭规律,以实现瞬变过程系统压力极值、高位水池水位极值安全度最高的目标,保证泵站连续停机过程可靠性。首先,建立耦合水力计算模型的泵阀联合优化调控模型,即通过优化调控模型生成决策变量后,驱动水力计算模型计算得到目标函数所需变量值,并返回至优化调控模型计算目标函数。其次,应用NSCOA算法求解优化调控模型,得到Pareto前沿解集。最后,利用IIPBD从Pareto前沿解集中优选泵阀联合调控方案。
1.1 泵阀联合优化调控模型
1.1.1 决策变量
对于有压输水工程水泵连续停机工况,水泵之间合理的运行时间间隔可防止回流和超压。泵后阀门两阶段关闭规律可有效减小压力脉动幅度,提高管道系统安全性。此外,水泵连续停机过程中末端阀门合理的关闭规律及对应响应规律亦可有效防止超压和水位超限。
因此,对于包含n台并联水泵的复杂长距离输水工程,其在连续停机工况下的决策变量包括:
1) 水泵停机间隔为Δtj(j=1,2,…,n-1);
2) 泵后阀的两阶段关闭规律:快关时间tn1、相对折点角度θn、慢关时间tn2;
3) 末端阀的关闭规律:n台水泵停机过程中,末端阀的响应调控角度βj(j=1,2,…,n-1)。
相应地,决策变量以向量X进行描述。
1.1.2 目标函数
为保证加压输水与重力输水相结合的长距离输水工程整体安全性,要求管道最大压力、最小压力不超过其承受能力,水泵倒转满足安全要求,并使高位水池满足不漏空不漫溢的同时,水位波动尽可能小。鉴于连续停泵过程水泵不发生倒转,因此,本文设立以下目标函数:
1) 系统最大压力最小。
2) 系统最小压力最大:为实现最小压力最大化,将该目标函数通过求其负值的最小值实现,其表达式为
3) 高位水池水位波动最小。
其中:Hmax、Hmin分别为水力瞬变过程中沿线的最大、最小水锤压力; Zmax、Zmin依次为高位水池控制断面在瞬变过程中出现的最高、最低水位。
1.1.3 约束条件
约束条件包括显式约束、隐式约束。其中,显式约束包括决策变量可行域约束,隐式约束则包含系统瞬变压力约束及高位水池水位约束。
1) 显式约束。
水泵停机间隔Δtj满足
其中:Δtmin、Δtmax分别表示水泵间的最大、最小停机间隔。
先快后慢的泵后阀关阀规律约束[22]为
其中:t1max和t1min分别为阀门的最大、最小总快关时间; t2max和t2min分别为泵阀机组中阀门允许的最大、最小总慢关时间。同时,鉴于快关不完全关闭,故θn>10%。
2) 末端阀响应调节开度约束。
其中:β0为末端阀初始阀相对开度; β1,β2,…,βn-1分别代表末端阀第1,2,…,n-1的响应调控角度。
3) 隐式约束。
系统最大压力不应超过泵出口额定压力的1.3~1.5倍[2]。
其中Hr_max表示水泵出口额定压力。
管道任何部位不应出现水柱断裂或负压; 对于立式或斜式轴流泵,虹吸式出水流道驼峰顶部的真空度不应超过7.5 m水柱高[23]。
高位水池断面水位应满足
其中:Zr_max、Zr_min分别为高位水池控制断面的设计最高、最低运行水位。
1.1.4 水力计算模型
基于有压管道非恒定流基本方程,包括运动方程和连续方程,结合阀门、高位水池、水泵、上下游水池的边界条件,建立有压输水系统模型,利用特征线法可求解出各水力参数。
1) 水锤计算的特征相容方程:
描述任意管道中水流运动状态的基本方程为
其中:H为测压管水头,Q为管道流量,D和A为管道直径和面积,t、a、g、f分别为时间变量、水锤波速、重力加速度、摩阻系数,x、δ分别为沿管轴线的距离及管轴线与水平面的夹角。式(13)和(14)可简化为标准的双曲线偏微分方程,利用特征线法可将其转化为管道水锤计算相容方程,其表达式为
其中:C+、C-分别为正、负特征线方程,Hi、Qi分别为此刻第i个节点的水头、流量, B、CP、CM为计算系数,其计算公式分别为
其中:Δx为管路的距离步长, Hi-1、Hi+1分别为上一时刻第i-1和第i+1节点的水头, Qi-1、Qi+1分别为上一时刻第i-1和第i+1节点的流量。
2) 水泵的边界条件由水头平衡方程式(20)和转矩方程式(21)组成[22],分别为
其中:Qp、(tdHp)分别为水泵流量、扬程, BS、CP为入口参数,BU、CM为出口参数,I为综合极惯性矩,np为水泵当前转速。
3) 阀门孔口过流方程[24]为
其中:Qv、Qv0分别为阀门瞬态流量、稳态流量,ΔH、ΔH0分别为阀门瞬态水头损失、稳态水头损失,τ为相对阀门开度。
4) 高位水池边界条件[24]为
其中:fS为摩擦损失系数,HS、DS、AS、Z分别表示高位水池的水位、直径、横截面积和底部标高,QS为高位水池流量,ω、σ分别为阻抗孔截面积和水头损失系数。
5) 上下游水库水位保持恒定,表达式为
其中HC为定水位值。
1.2 基于NSCOA的泵阀联合优化调控求解方法
1.2.1 浣熊优化算法(COA)
COA基本思想源于长鼻浣熊的2种自然行为,即攻击鬣蜥策略(探索阶段),以及免受捕食者侵害的逃脱行为(剥削阶段)[10]。
1) 探索阶段。
在探索阶段,一半浣熊爬上树搜寻鬣蜥,一半浣熊在树下等待。树上浣熊位置更新为
鬣蜥倒地后,地面上的浣熊在搜索空间移动,其位置表示为
其中:Gg为鬣蜥的位置,bL为寻优下边界,bU为寻优上边界,FGg为鬣蜥落在地面后的目标函数值,Fu为第u只浣熊的目标函数值。
2) 剥削阶段。
为逃离捕食者,浣熊逃离其位置,该过程表达式为
其中:blocL为局部下边界,blocU为局部上边界,d为迭代次数,D为最大迭代次数。
1.2.2 基于非支配排序的浣熊优化算法(NSCOA)
基于非支配排序的多目标浣熊优化算法(NSCOA)[17]根据非支配等级和拥挤距离选择最佳个体。
非支配排序可确定浣熊个体支配关系,即任意2个具有p个子目标的浣熊个体Coati1和Coati2,若满足式(30),则称Coati1支配Coati2,记为Coati1>Coati2。
相反地,若Coati1、Coati2不满足上式,则两浣熊个体互不支配,此时Coati1和Coati2所对应的解互为非支配解或Pareto解。
拥挤度距离代表同一个非支配等级中某个体与周围其他个体的密集程度,表征个体的均匀性。设系统共有λ个目标函数,依照每个优化目标函数值fg,将种群中所有个体进行升序排列,令边界的2个个体拥挤度为∞,其他个体w的拥挤度为
在进行目标函数比较时,首先比较个体的非支配等级,优先选择等级小的个体,若2个个体非支配等级相同,则对比拥挤度,选择拥挤度大的个体。非支配排序与拥挤距离使得种群向Pareto前沿进化,解集均匀分布,并保证种群的多样性,加快算法演化。
1.2.3 基于NSCOA的泵阀联合优化调控求解方法
基于NSCOA的泵阀联合优化调控模型求解流程如图 2所示,其主要求解过程包括以下4个部分:
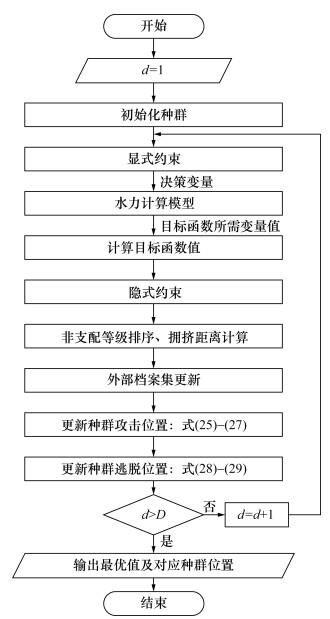
1) 初始化种群。对于n台并联水泵连续关闭,各决策变量初始化位置为
其中:u⊆[0,M], α为[0, 1]随机数。
2) 约束处理及目标函数计算。通过式(5)—(9)对决策变量进行显式约束,将其超范围数值置于边界。将约束处理的决策变量传入水力计算模型,求解得到目标函数所需的变量值,并返回至优化调控模型计算目标函数,通过式(10)—(12)进行隐式约束,将不满足要求的目标函数采用罚函数的形式将其扩大10 000倍进行处理。
3) 非支配排序。根据个体的目标函数进行非支配排序,并计算个体拥挤距离,更新外部档案集。
4) 更新迭代。根据式(25)—(29)更新迭代次数d时的决策变量及其对应目标函数,进而通过非支配排序确保每个等级中的个体均不被其他个体完全支配,同时计算拥挤度距离以评估个体间的分布情况和多样性; 不断通过更新策略进行迭代计算,将非支配个体存储在外部档案集,最终获得Pareto解集。
为验证NSCOA算法的优越性,选取经典启发式算法非支配排序遗传算法(non-dominated sorting genetic algorithm Ⅱ,NSGA-Ⅱ)和非支配排序麻雀算法(non-dominated sorting sparrow algorithm,NSSA)与NSCOA进行比较。为避免计算偶然性,分别对ZDT1—ZDT4、ZDT6测试函数进行30次独立运算,并根据常用的多目标算法评价指标HV[25]和SP[26]进行评估。一般而言,HV平均值越大说明解集的收敛性和分布性越好,SP平均值越小表明解集中个体的分布均匀性与多样性越好,HV、SP标准差越小则表明计算结果更具稳定性。将各算法种群与迭代次数均设置为100,其他参数设定如下:NSGA-Ⅱ中变异概率与交叉比例分别定为0.02、0.7。NSSA中发现者与侦察者比值分别为20%和10%,安全值为0.8。表 1和表 2分别展示了各算法求解测试函数得到的HV和SP的平均值(Mean)和标准差(Std)。
表 1 HV评价对比 |
| 测试函数 | NSGA-Ⅱ | NSSA | NSCOA | |||||
| 平均值 | 标准差 | 平均值 | 标准差 | 平均值 | 标准差 | |||
| ZDT1 | 0.719 4 | 4.56×10-4 | 0.719 4 | 1.87×10-4 | 0.719 6 | 1.52×10-4 | ||
| ZDT2 | 0.403 1 | 4.95×10-4 | 0.190 9 | 3.42×10-4 | 0.444 1 | 5.71×10-4 | ||
| ZDT3 | 0.601 0 | 8.39×10-4 | 0.600 5 | 2.34×10-4 | 0.601 3 | 1.24×10-4 | ||
| ZDT4 | 0.719 5 | 5.30×10-5 | 0.722 3 | 4.94×10-5 | 0.722 5 | 4.71×10-5 | ||
| ZDT6 | 0.389 9 | 4.49×10-4 | 0.388 3 | 3.85×10-4 | 0.390 2 | 3.56×10-4 | ||
表 2 SP评价对比 |
| 测试函数 | NSGA-Ⅱ | NSSA | NSCOA | |||||
| 平均值 | 标准差 | 平均值 | 标准差 | 平均值 | 标准差 | |||
| ZDT1 | 0.003 1 | 6.91×10-4 | 0.004 1 | 3.71×10-4 | 0.003 6 | 1.51×10-4 | ||
| ZDT2 | 0.004 2 | 7.24×10-4 | 0.004 9 | 3.59×10-4 | 0.004 0 | 3.48×10-4 | ||
| ZDT3 | 0.004 7 | 1.49×10-4 | 0.003 9 | 2.49×10-4 | 0.003 7 | 1.46×10-4 | ||
| ZDT4 | 0.003 1 | 1.52×10-4 | 0.007 4 | 4.94×10-4 | 0.003 1 | 7.65×10-5 | ||
| ZDT6 | 0.029 1 | 1.69×10-3 | 0.045 7 | 4.85×10-3 | 0.002 8 | 4.71×10-4 | ||
1.3 基于改进理想点分析的决策方法
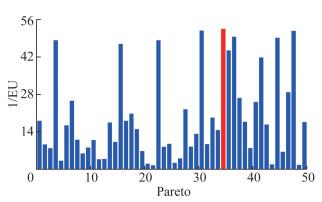
通过NSCOA求解泵阀联合优化调控模型得到Pareto非支配解后,可采用改进理想点法(IIPBD)[21]确定决策折中方案。IIPBD通过在决策方案中确定出理想解,计算各决策方法与理想解的趋近度,并对此趋近度进行远近排序,最终判断各决策方法的优劣性。
首先,对所有Pareto非支配解的适应度值进行归一化处理。
其中:yμ(ep)为第p个Pareto前沿解第μ个目标函数的归一化值,Fμ为Pareto前沿解的适应度函数,Fμmax和Fμmin分别为第μ个目标函数的最大值和最小值。归一化后的目标理想点为(0,0,0)。
其次,计算第p个Pareto前沿解到目标理想点的Euclid距离平方,如下:
其中ημ为第μ个目标函数的权重系数。
最后,以所有Pareto前沿解在各个目标上的Euclid距离平方之和最小为原则,确定泵阀联合调控的最佳折中决策方案。
其中:ebest为最佳折中决策方案的决策变量; nr为Pareto前沿解数量。
2 实例分析
2.1 工程概况
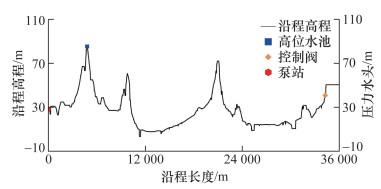
选取山东省某加压输水与重力输水相结合的输水工程进行实例分析,该输水工程由上游水库、泵站、有压输水管道、高位水池、阀门与下游水库组成,其高位水池上游采用水泵加压输水方式输水,下游采用有压重力输水方式输水。上、下游水库作为上、下游边界条件,其设计水位分别为28.08 m、50.44 m。输水管线全长35 810.3 m,输水管径为2 000 mm,管道最大允许承受压力为110.0 m。管道管材为预应力钢筒砼管,糙率为0.012。泵站设计流量为5.5 m3/s,设计扬程为65.0 m,泵站内安装4台800S65型双吸离心泵(3用1备),额定转速750 rpm,效率为85%,转动惯量为4 416 kg·m2,配功率为1 700 kW的同步电动机,电机轴功率1 425 kW,泵出口设置DN 1 000 mm电动蝶阀。高位水池设计最高水位95 m,设计最低水位84 m,底板高程83.0 m,池顶高程96.1 m。管道末端设DN1 200 mm控制阀,控制阀的开启和关闭采用直线关闭规律,总关时长27 min。输水工程管线纵断面如图 3所示。该输水工程现状调控方案为:3台泵停机间隔均为10 min,泵后阀采用30 s快关66.7%,60 s慢关33.3%,管线末端的活塞式控制阀于第一台机组停泵时在1 195 s内由开度73.9% 定速关闭至0。
2.2 现状方案模拟分析
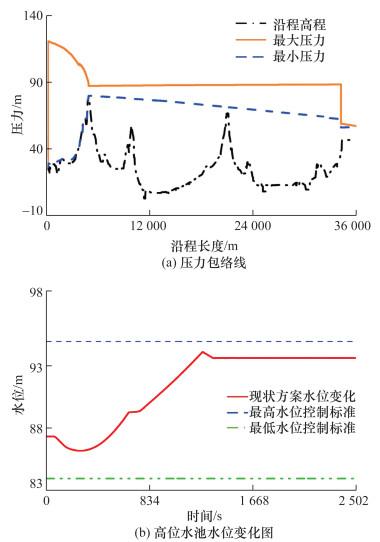
利用自主编程的水力计算模型对连续停泵工况现状方案进行仿真计算。其中,管道节点布置依据管道特性及水力设施、建筑物所在位置进行划分,以确保1个单元内包含1个水力设施。计算时间步长设置为0.01 s,空间步长分别取时间步长与各管段水锤波速之积。现状方案下管道压力包络线及高位水池水位变化如图 4所示,系统沿程最小压力、最大压力分别为—4.64 m和106.11 m,均符合压力极值要求。然而,高位水池最高、最低水位和水位波动分别为94.16 m、86.23 m和7.93 m,水池最高水位距设计最高水位值仅0.84 m,安全裕量较低且水位波动幅度大,易发生漫溢现象,故为进一步提高该输水工程的安全性,需对泵阀联合调控模型进行多目标优化研究。
2.3 泵阀联合优化调控结果分析
该工程泵阀联合优化调控模型涉及的泵后阀快关时间、泵后阀慢关时间、泵后阀快关相对开度等多个参数的取值范围,如表 3所示。
表 3 泵阀联合优化调控模型参数设置 |
| 参数 | 范围 |
| 泵后阀快关时间t11、t21、t31 | [10,20] s |
| 泵后阀慢关时间t12、t22、t32 | [40,140] s |
| 泵后阀快关相对开度θ1、θ2、θ3 | [10%,20%] |
| 水泵间的停机间隔Δt1、Δt2 | [100,900] s |
| 末端阀两次关闭相对开度β1、β2 | [30%,90%] |
2.3.1 基于NSCOA算法的泵阀联合优化调控优化方法参数选择
NSCOA可调控参数包括种群数量N、迭代次数D和外部档案集中的个体数量K。为研究NSCOA在不同N、D和K下的优化效果,使算法在泵阀联合优化调控中发挥最优效能,本节通过评价指标HV和SP判断算法的性能。为避免算法寻优的随机性,将依次停机工况独立测试运行5次,取平均值为最终结果。不同N、D和K下NSCOA获得的HV及SP指标平均值如表 4所示。当D=50次,K=50个时,随着N的增加,HV平均值整体呈现上升趋势,SP平均值为下降趋势,表明增大N有助于提升算法性能。同样地,算法性能亦遵循K及D越大,收敛性和多样性越好的规律。当NSCOA在N=50个,K=50个,D=75次时,HV及SP指标平均值分别为3 583.72、0.53,算法趋于收敛状态。故推荐NSCOA算法参数N=50个,K=50个,D=75次,从该参数设置求解得到的Pareto前沿解中选优确定最优调控方案。
表 4 不同N、D和K下NSCOA获得的指标平均值 |
| N | HV平均值 | SP平均值 | |||||||||||||
| D=25 | D=50 | D=75 | D=100 | ||||||||||||
| K=50 | K=75 | K=100 | K=50 | K=75 | K=100 | K=50 | K=75 | K=100 | K=50 | K=75 | K=100 | ||||
| 25 | 3 174.23 | 3 180.71 | 3 195.50 | 3 184.95 | 3 276.54 | 3 482.93 | 3 579.75 | 3 501.57 | 3 513.50 | 3 583.71 | 3 583.79 | 3 583.92 | |||
| 0.76 | 0.68 | 0.63 | 0.69 | 0.65 | 0.60 | 0.61 | 0.58 | 0.57 | 0.61 | 0.58 | 0.57 | ||||
| 50 | 3 248.55 | 3 250.43 | 3 257.92 | 3 480.57 | 3 486.86 | 3 490.05 | 3 583.72 | 3 583.82 | 3 583.84 | 3 583.84 | 3 583.85 | 3 583.87 | |||
| 0.69 | 0.64 | 0.61 | 0.55 | 0.55 | 0.53 | 0.53 | 0.52 | 0.52 | 0.52 | 0.52 | 0.50 | ||||
| 100 | 3 262.51 | 3 268.78 | 3 275.43 | 3 489.20 | 3 481.47 | 3 493.42 | 3 583.77 | 3 583.83 | 3 583.84 | 3 583.86 | 3 583.95 | 3 583.98 | |||
| 0.67 | 0.62 | 0.59 | 0.54 | 0.54 | 0.53 | 0.53 | 0.51 | 0.51 | 0.51 | 0.50 | 0.50 | ||||
| 150 | 3 370.12 | 3 383.24 | 3 394.71 | 3 491.27 | 3 499.39 | 3 506.55 | 3 583.81 | 3 583.87 | 3 583.93 | 3 583.94 | 3 584.01 | 3 584.08 | |||
| 0.62 | 0.60 | 0.59 | 0.54 | 0.54 | 0.53 | 0.51 | 0.50 | 0.50 | 0.50 | 0.49 | 0.49 | ||||
注:N为种群数量,单位:个; D为迭代次数,单位:次; K为外部档案集中的个体数量,单位:个。 |
2.3.2 不同算法下泵阀联合优化调控结果分析
为检验NSCOA求解泵阀联合优化调控模型的优越性,选取经典启发式算法NSGA-Ⅱ和NSSA与NSCOA进行对比分析。泵阀联合优化调控模型中,取N=50个,K=50个,D=75次,各算法参数设定同1.2.3节一致。各算法求解泵阀联合优化调控模型计算的HV、SP平均值如表 5所示。
表 5 各算法获得的指标平均值 |
| 评价指标 | NSCOA | NSGA-Ⅱ | NSSA |
| HV平均值 | 3 583.72 | 3 181.03 | 3 254.76 |
| SP平均值 | 0.53 | 0.54 | 0.56 |
由表 5可知,NSCOA的HV平均值为3 583.72,较NSGA-Ⅱ、NSSA的分别大402.69、328.96,说明NSCOA对于泵阀联合调控模型优化的综合效果较好,NSCOA、NSGA-Ⅱ和NSSA的SP平均值分别为0.53、0.54、0.56,表明NSCOA收敛性和解集多样性较优。
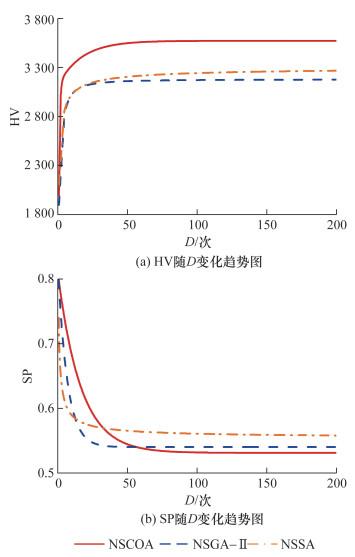
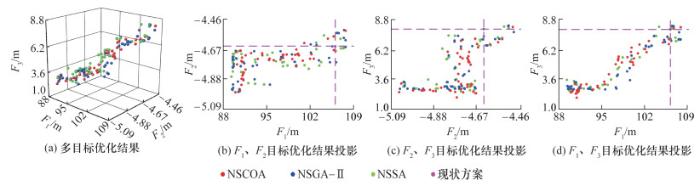
图 6为3种算法所得的泵阀联合优化调控模型优化结果。其中,图 6a为Pareto前沿解,图 6b—6d为Pareto前沿解的二维投影图,投影图以现状方案为原点,将其划分为4个象限。图中F1代表最大水锤压力,F2为最小水锤压力,F3表示高位水池水位波动幅值。粉色标记代表现状方案,红色、蓝色、绿色标记分别表示NSCOA、NSGA-Ⅱ、NSSA计算的Pareto前沿解。在图 6b中,NSCOA、NSGA-Ⅱ、NSSA的Pareto前沿解在横坐标正方向的范围为[89.8,107.9]、[89.1,107.7]、[89.3,107.4],跨度分别为18.1、18.6、18.1,NSCOA可达性表现良好。图 6c中NSCOA得到的F2min、F2max分别为-5.05、-4.50,距离达到0.55,可达性与NSGA-Ⅱ、NSSA相比差距较小。NSCOA的F3min=2.0、F3max=8.1,在坐标轴的纵向范围明显较大,如图 6d所示。因此,NSCOA在解集分布广泛性方面表现更优,在求解泵阀联合优化调控问题方面更具优势。
2.4 基于IIPBD的最优调控方案
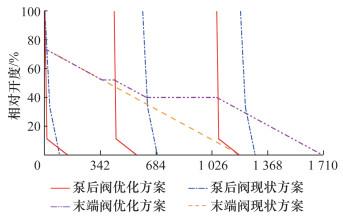
基于IIPBD所得最优调控方案,其泵后阀及末端阀调控规律如图 8所示,较于现状方案,泵后阀快关时间从30 s缩短至12 s,泵后阀快关相对开度由33.3%降低到11.1%,慢关时间由60 s增加到126 s,水泵时间间隔分别调整为425 s和630 s,并对末端阀进行了更精细的控制,设置两次相对开度分别为52.2%和40.0%。其管道最大、小压力包络线图及高位水池水位变化图如图 9a—9c所示。由管道最大压力包络线图 9a可知,最优调控方案下系统最大压力为90.83 m,较现状方案降低了15.28 m。造成该现象的原因在于最优调控方案下泵后阀在快关阶段其关闭速率较大,迅速减小了流体流速,避免了由于速度急剧下降而产生的压力激增,因此有效降低了管道最大压力。此外,由于末端控制阀关闭速度恒定,故两方案下高位水池后的重力自流段压力变化幅度相似,但在最优调控方案下第一次调节控制阀时阀门开度较大,因此,其高位水池后管道压力整体较原方案出现了下降。由管道最小压力包络线图 9b可以看出,最优调控方案管道压力最小为-4.67 m,虽然较现状方案方案降低了0.03 m,但其仍在管道安全允许范围内,由图 9c可知,最优调控方案与现状方案的高位水位波动变化趋势较为相似,均发生两次先降后升的变化,但最优调控方案下系统最高水位、最低水位分别为88.39 m、86.04 m,2.35 m的最大涌浪较原方案则降低了70.37%。影响高位水池水位变化的根本原因为流入流出高位水池流量差,故进一步分析了流入流出高位水池的流量变化,如图 9d所示。
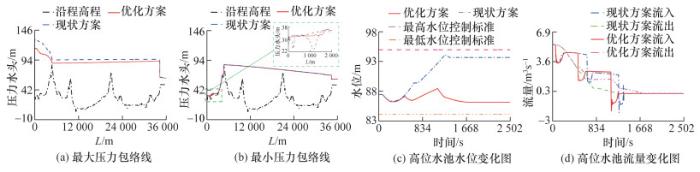
由图 9d可知,现状方案末端阀的调节未与水泵的连续停机相配合,导致高位水池流入流量长时间大于流出流量,致使高位水池水位持续上涨,极易出现漫溢现象。最优调控方案减少了水泵停机间隔,同步调整了末端阀开度,使流入流量与流出流量差值在同一时间相差较小,据此降低了水池水位变化幅度,由此可见优化方案更具有安全性。
3 结论
本文以某加压输水与重力输水相结合的复杂长距离输水工程为例,建立了连续停泵工况下基于水力计算的泵阀联合优化调控模型,通过NSCOA算法求解得到了Pareto前沿解,并利用IIPBD获得了最佳优化调控方案。相关结论如下:
1) 采用NSCOA对泵阀联合优化调控模型进行求解,在短时间内可获得分布广泛的Pareto前沿解集,其在多个维度上均优于现状调控方案。
2) 基于HV与SP指标的综合评估,验证了NSCOA算法相较于NSGA-Ⅱ及NSSA算法可展现出更优性能,对于泵阀联合优化调控模型的优化效果显著。
3) 根据IIPBD对各个Pareto前沿解进行优选,优选方案缩短了泵后阀快关时间,增加了慢关时间,协调了水泵时间间隔及末端阀响应关闭规律,从而使其较原方案最大压力降低了15.28 m,控制了高位水池水位不漏空不漫溢,水位波动降低了70.37%。
研究结果验证了NSCOA算法在连续停泵工况下求解泵阀联合优化调控模型的可靠性,可为长距离复杂输水工程优化泵阀联合调控问题提供更为高效、可行的方案。未来,作者将进一步针对事故停泵、工况切换等不同工况展开研究,从而为复杂输水系统运行提供更加有力的支撑。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}