

为有效预防事故,施工过程中可以通过监测起重机的运行数据及工人的位置,及早识别安全风险并及时发出预警[5-7]。信息技术在起重机安全风险监测中发挥了重要作用。例如,在起重机监测方面,Kan等[8]基于信息物理技术构建了起重机与其虚拟模型之间的双向通信与协调机制,借助传感器技术感知周围环境,并利用数据分析识别潜在安全隐患,从而对起重机进行实时反馈控制。在吊物与工人检测方面,Price等[9]基于计算机视觉技术,通过负载摆动和旋转估计、工人检测和跟踪以及工作区动态更新,实现了起重机工作空间的动态更新,从而避免盲吊作业过程中的碰撞;张燕超等[10]采用YOLOv8算法对工人和吊物进行目标识别,并利用双目立体定位技术确认目标的位置和形状信息,实现了实时监测工人是否进入起重机的危险区域;Chian等[11]通过CenterNet等计算机视觉方法动态检测起重机负载在地面的投影,并结合工人检测,实现了工人进入危险区域的自动识别;Yang等[12]利用掩码区域卷积神经网络(mask region-based convolutional neural network,Mask R-CNN)识别工人、危险区域和塔吊吊钩的像素坐标,并将其转换为实际的安全距离;Zhang等[13]通过FairMOT模型对工人和吊物进行跟踪,获取其形状、位置、速度和历史轨迹信息,并结合Transformer模型预测对象轨迹,从而提前识别工人和吊物间的不安全接近情况。
然而,在起重机监测方面,当前研究主要集中于起重机吊物的监测,对于起重机整体工作空间的全面研究仍有不足。在工人监测技术方面,通常采用传感器或计算机视觉两种方法。但由于钢结构对无线信号传输的显著干扰,基于超宽带(ultra wide band,UWB)、全球定位系统(global positioning system,GPS)等无线传感器的工人定位技术在钢结构施工场景中的表现不佳。同时,现有的视觉方法大多聚焦于确定工人在图像中的位置,而针对精确提供工人真实坐标信息的方法的研究仍然不足。
为此,本研究提出了一种结合建筑信息模型(building information modeling, BIM)、起重机传感器和计算机视觉技术的空间碰撞监测方法,用于钢结构施工场景中起重机与工人之间的安全监测。该方法通过划分起重机工作空间并监测起重机运行数据,实现了对起重机整体工作空间的分级管控;同时,利用YOLO11-OBB模型和透视变换技术对现场工人在图像中的位置进行定向识别,并将其转换为起重机坐标系下的坐标。具体步骤如下:首先,根据危险程度对起重机的工作空间进行分类,划分为低、中、高风险3个区域,并建立中、高风险区域范围的计算公式;然后,通过定位和测距等传感器实时监测起重机的位置和姿态;同时,结合YOLO11-OBB和透视变换,根据预先标定的锚点以及工人在图像中的位置,计算工人在起重机坐标系下的坐标。最后,将现场监测数据集成至三维管理平台,实时计算并可视化起重机与工人的空间碰撞风险。
1 起重机工作空间危险等级划分与界定
张知田等结合BIM、传感器与计算机视觉技术提出的危险检测方法,在塔吊与工人的空间危险交互场景中取得了较好的检测效果[8]。基于此,本研究进一步探究了移动式起重机姿态和吊物危险区域的监测方法,并依据危险程度将起重机的工作空间划分为3个级别——低风险、中风险和高风险区域,以实现差异化风险响应。低风险区域为起重机在当前限位条件下无法到达的区域,危险程度较低;中风险区域为起重机在当前限位条件下通过吊臂伸缩、旋转等操作能够到达的区域,存在一定安全风险;高风险区域为吊物下方的投影区域,可能导致严重的安全事故。本研究主要对中风险和高风险区域范围内的碰撞监测进行讨论。
1.1 中风险区域界定
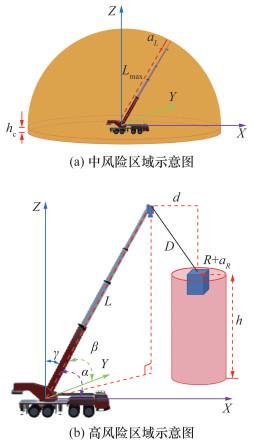
以起重机与吊臂的连接处为坐标系原点,正东方向为X轴正方向,正北方向为Y轴正方向,垂直地面向上为Z轴正方向,建立三维坐标系。对于中风险区域,需要考虑起重机通过吊臂伸缩、旋转等操作所能到达的空间。因此,以坐标原点为圆心,以吊臂最大伸展距离Lx和安全距离aL之和为半径作半球,并将该半球区域,以及以最大圆面为底、从连接处至地面的高度hc为圆柱高的空间,定义为中风险区域,如图 2a所示。
1.2 高风险区域界定
根据中国行业标准JG/T 100—1999《塔式起重机操作使用规程》[14],在重物升降时,禁止人员在重物下方通行或停留。因此,本研究将以吊钩为中心一定范围内到地面的空间区域定义为高风险区域。具体定义方法如下:
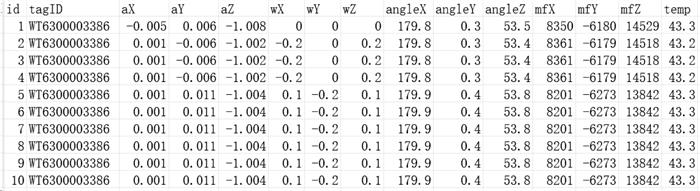
1) 计算吊臂顶部的坐标。由于起重机位于钢结构建筑的外侧,本研究仍然使用传感器来监测起重机的角度和位置等数据。具体流程包括:通过安装在起重机与吊臂连接处的角度传感器,获取吊臂的转角,并标记吊臂相对于X、Y、Z 3轴的夹角分别为α、β、γ;同时,使用UWB测距传感器测量吊臂的实际伸展距离和吊绳长度,吊臂长度标记为L,吊绳外伸长度标记为D,如图 2b所示。基于这些参数,吊臂顶部的坐标为
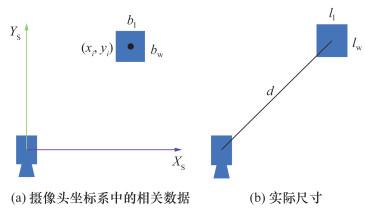
2) 通过摄像头拍摄的实际图像并结合比例尺计算吊钩相对吊臂顶部的偏移距离[15]。将摄像头垂直向下安装在吊臂顶部,并以图像中点(即摄像头位置)为坐标原点,正东为XS轴正方向,正北为YS轴正方向,建立摄像头坐标系,如图 3a所示。假设吊钩位于吊物中心线上,吊物的真实长度定义为ll,真实宽度为lw,吊钩与吊臂顶部的水平距离为d,如图 3b所示。图像中检测到的吊物长度为bl,宽度为bw,吊物顶面几何中心坐标为(xi, yi)。考虑到识别误差,取平均比例尺S作为参考比例尺,计算公式如式(2)所示。结合吊物中心坐标和比例尺,计算吊钩相对吊臂顶部在X、Y、Z 3个方向上的真实摆动距离Δx、Δy、Δz,具体计算公式见式(3)—(6)。
因此,吊钩在起重机坐标系中的坐标可以计算为(Lcosα+Δx, Lcosβ+Δy, Lcosγ+Δz)。基于此,起重机的高风险区域可以定义为以吊钩为顶面中心点、以R(见式(7))+aR(安全距离)为半径、以h(见式(8))为高的圆柱空间。
综上所述,可以得到起重机作业的中风险区域数学表达如式(9)所示、高风险区域数学表达如式(10) 所示。
中风险区域:
高风险区域:
2 工人位置确定
2.1 工人图像坐标确定
本研究利用YOLO检测框底部中心点获取工人的图像坐标,如图 4所示。由于检测框与人体实际位置之间存在一定偏差,为了减小误差,本研究将检测框底部中心点向识别框中心点方向平移Δh。Δh公式如式(11)所示,其中height为检测框的高度,ah为比例系数,可根据人体比例、检测区域与摄像头的距离等因素确定。
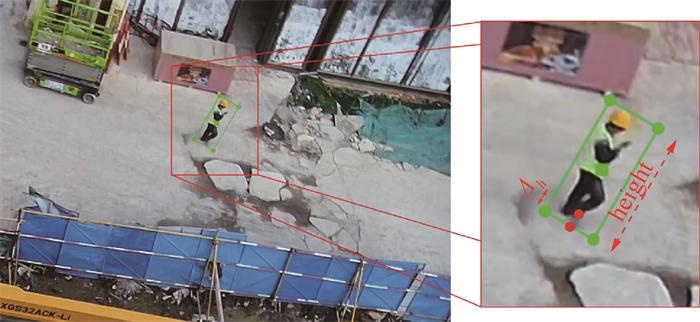
此外,由于图像中可能出现透视变形,导致人体轮廓在图像上呈现一定倾斜,如果直接采用未考虑倾斜角度的检测框,将导致对工人图像坐标的确定产生较大误差。为此,本研究采用了YOLO11-OBB模型对施工现场摄像头拍摄的图像进行识别。YOLO11-OBB是一种实时目标检测模型,能够在图像中对多目标进行实时检测、分类与定位。与普通版本相比,YOLO11-OBB通过引入角度参数θ,能够锁定任意方向上的目标位置,更好地生成具有一定角度位置的物体预测结果,具体如图 4所示。
2.2 图像坐标系与起重机坐标系的转换
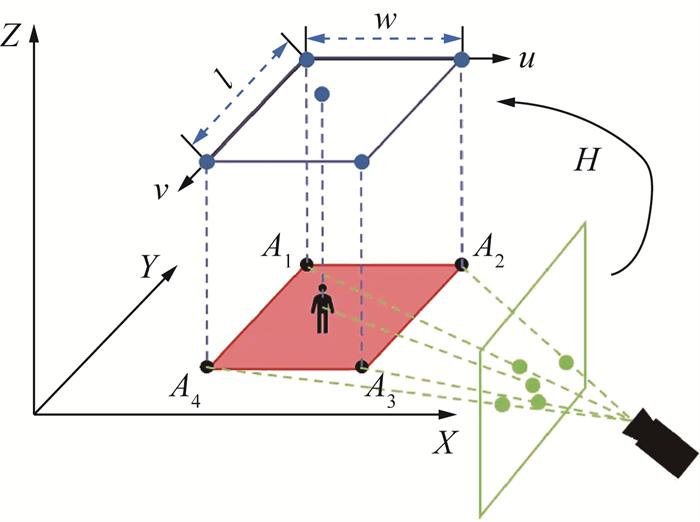
本研究事先在现场预设若干锚点并测得这些锚点在起重机坐标系的坐标,再基于工人与锚点在图像中的相对位置关系推算出工人在起重机坐标系下的坐标。然而,由于现场大部分摄像头采用侧拍或斜拍视角,图像不可避免地存在透视变形。若直接通过比例尺换算坐标,将导致较大误差。因此,需要先利用透视变换,将图像从测试视角转为俯视视角。在水平面(如地面、作业平台)的俯视视角下,图像中地物体不会因为深度信息产生明显畸变,故可减小误差。透视变换的具体公式为
其中:[X Y Z]T表示某点在俯视图像中的坐标,可令其齐次坐标分量Z为1;[x y 1]T为该点在其他视角图像中的坐标;H为透视变换矩阵,根据齐次坐标的比例不变性,可将其h33分量设为1。
具体操作如下:1) 在现场选定矩形待检测区域(如图 5中的红色区域所示)的4个顶点,分别记为A1、A2、A3、A4,并测量4个顶点在起重机坐标系下的坐标,分别记为A1(x1, y1)、A2(x2, y2)、A3(x3, y3)、A4(x4, y4);2) 将4个顶点设为俯视图像的4个顶点,像素坐标分别记为A1(0, 0)、A2(w, 0)、A3(w, l)、A4(0, l),w×l即为俯拍图像分辨率大小;3) 将A1、A2、A3和A4 4个顶点在起重机坐标系下的坐标和像素坐标代入式(12)中,可解得透视矩阵H;4) 结合透视变换矩阵,将2.1节中通过YOLO11-OBB检测得到的工人在侧视图像中的像素坐标转换为俯视图像中的对应坐标;5) 基于矩形区域4个顶点在起重机坐标系下的坐标和像素坐标,以及工人在俯视图像中的像素坐标,通过双线性插值法计算工人在起重机坐标系下的坐标。具体情况如图 5所示。
3 起重机与工人的空间碰撞检测
本研究依据国家标准GB/T 10000—2023《中国成年人人体尺寸》[16]提供的工作空间设计用人体功能尺寸数据,并结合实际现场的主要工人群体特点,选取18~70岁成年男性的双臂展开宽和中指指尖点上举高的数据,构建了工人工作空间模型。该工人空间模型用圆柱体表示:
其中:Xc和Yc分别为工人在起重机坐标系中的X轴和Y轴坐标;1 864为18~70岁成年男性中P99百分位数的双臂展开宽(mm),arh为双臂展开宽的安全距离,单位为mm;2 338为18~70岁成年男性中P99百分位数的中指指尖点上举高度(mm),ahh为高度的安全距离,单位为mm。
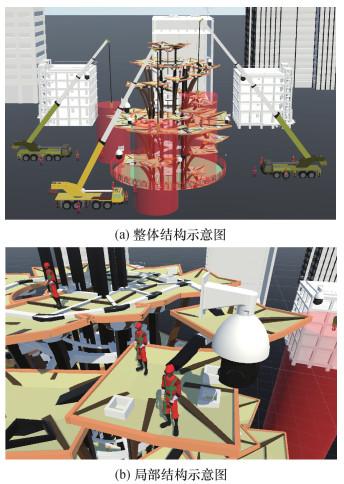
三维数字孪生平台基于Unity引擎开发,通过预先建模将现场的主要建筑、起重机和工人等三维模型导入平台。此外,平台配置了云服务器,用于接收传感器上传的实时起重机状态数据和现场视频流,并根据Unity的请求将相关数据传输至三维平台。在通过定位方法确定工人位置后,平台结合现场起重机的实时数据,能够计算工人与起重机工作空间的碰撞风险情况。当工人进入低风险区时,无须采取干预措施;若工人进入中风险区时,系统将在后台自动记录相关信息,但不会触发警报;若工人进入高风险区,系统将触发广播警报,并上报给管理人员。
4 案例分析
以西安某商业中心施工项目为案例,基于本文提出的方法重点监测了现场中心区域主体钢结构施工中起重机与工人的潜在碰撞风险。由于项目主体钢结构采用复杂的空间结构体系,施工过程中需要多台起重机协同工作,对吊装作业的安全性提出了很高要求。本研究根据现场实际情况,对所采用的监测方法进行了适应性优化,并开展了为期9个月的监测工作。
在起重机传感数据中,RTK+GPS传感器精度为±2.5 m,吊臂伸长和吊臂角度数据精度分别为±10 cm和±0.05°。根据中、高风险区域误差累计公式(分别见式(14)和(15)),可得中、高风险区域的监测误差范围分别为±2.600 m和±2.611 m。
其中:Δx为RTX+GPS传感器精度;ΔL为吊臂伸长精度;Δα为吊臂角度精度;α为吊臂角度,取45 °;L为吊臂长度,取65 m。
对于工人位置的获取,由于YOLO11-OBB模型的预训练数据主要来源于DOTA等数据集,这些数据集多用于检测飞机、轮船等目标,缺乏针对人体检测的特定样本,因此该模型在工人识别任务中的性能存在一定局限性。为了解决这一问题,本研究采集了施工现场及日常生活场景中包含人的图像,构建了专用数据集,并对YOLO11-OBB模型进行了再训练,以提高模型对工人目标的识别能力与适应性。本研究构建的数据集包含474张图像,并使用roLabelImg旋转标注工具完成标注,如图 7所示。

训练时,输入图像的分辨率设定为1 024×1 024像素,训练迭代次数为100,批次大小为2,优化器选择随机梯度下降(stochastic gradient descent,SGD),初始学习率为0.01。经过训练与验证,训练后的模型均达到较高的精度,精确度为0.968,召回率为0.969,50%交并比(intersection over union, IoU) 时的平均精度(mean average precision at IoU 50%,mPA50)为0.980,50%~95%交并比时的平均精度(mean average precision at IoU 50%-95%,mPA50-95)为0.864。与Faster RCNN、单次多框检测(single shot multibox detector, SSD)和CenterNet识别模型相比,本文建立的模型具有更高的精度[17],能够满足一般条件下施工现场中对工人目标的识别。
为评估工人图像坐标与起重机坐标系下的坐标的转换方法,本研究构造了A、B、C 3种场景:A场景采用侧拍,B场景采用侧拍+部分遮挡,C场景采用前后拍。每种场景使用(0, 10] m和(10, 20] m两种拍摄距离,共创建了6组实验数据,包含721张图像,以模拟实际施工现场摄像头的拍照情况。首先,在场景中选定4个锚点,并测量各锚点在起重机坐标系下的坐标;其次,保持同一场景中摄像头的位置不变,更改工人的位置,并记录对应的真实坐标;然后,对拍摄图像进行筛选,剔除不合格图像后,最终保留683张有效图像;接着,提取图像中锚点的图像坐标,并利用训练好的YOLO11-OBB模型检测图像中工人的位置,获得在侧拍视角下的工人图像坐标;最后,通过坐标转换和双线性插值方法,计算工人在起重机坐标系下的坐标,并将预测值与真实值进行对比和分析,结果如表 2所示。
表 2 坐标转换测试结果 |
| 目标距离摄像头距离/m | 场景 | 图像数量/张 | MAE/mm | MRE/% | RMSE/mm |
| (0, 10] | A | 50 | 69.12 | 4.12 | 84.26 |
| B | 137 | 79.65 | 3.57 | 105.32 | |
| C | 106 | 67.11 | 7.15 | 77.27 | |
| (10, 20] | A | 71 | 71.95 | 5.23 | 89.84 |
| B | 167 | 77.84 | 3.95 | 104.08 | |
| C | 152 | 42.63 | 3.06 | 54.33 | |
| 合计 | 683 | 67.44 | 4.32 | 86.16 | |
表 2的数据结果显示,该方法的平均绝对误差(mean absolute error,MAE)、平均相对误差(mean relative error,MRE)和均方根误差(root mean squared error,RMSE)分别为67.44 mm、4.32%和86.16 mm。对比同一场景中不同距离区间的定位结果,发现工人定位误差并未随着距离的增加而显著增加。此外,由于B组场景中设置了部分遮挡,测试结果显示定位误差相对较大。这是因为遮挡可能降低模型对工人目标的检测准确性,导致检测框底部发生偏移,进而影响坐标转换的准确度。表 2结果表明,模型是否能够准确识别并匹配目标的角度与位置,是影响工人最终坐标计算准确率的直接和关键因素,而非目标距离摄像头的距离。
为验证效果,本研究还测试了基于UWB的工人定位精度。在无遮挡情况下,UWB的理论精度为20 cm,但在该钢结构施工现场,由于干扰较多,误差达到1 m的量级。另外,与以RealSense D400系列摄像机为代表的立体视觉方法相比,后者的最大捕捉距离通常不超过10 m[18],本方法在20 m的拍摄距离下仍能保持较高的精度;在该距离内,即使拍摄距离增加,坐标转换距离误差也未出现显著增大。此外,本研究通过透视变换,使得摄像头的布置不再局限于垂直拍摄角度,从而能够更好地适应日常摄像头的拍摄角度。综上所述,与现有技术相比,本方法具有更高的精度和泛用性。
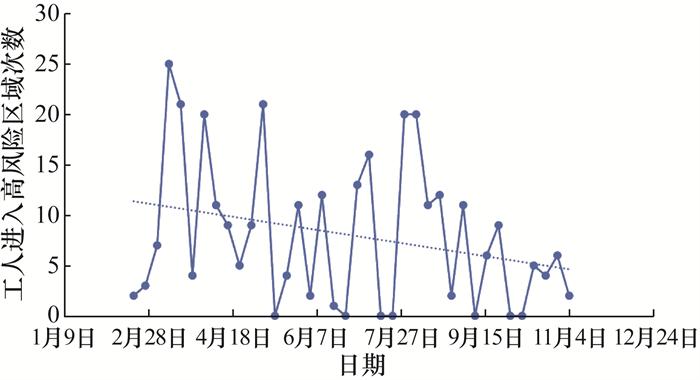
工人的位置得到确认后,将起重机与工人的相关信息实时传输至三维数字孪生平台,以实时监测起重机与工人的碰撞情况,具体效果如图 8所示。根据吊物投影和工人定位误差计算结果,式(9)和(10)中的安全距离aL和aR均取3 m,式(13)中的arh和ahh均取0.5 m。图 9展示了项目部分时间段内识别到的高风险情况。图 9显示,在项目初期,工人进入起重机高风险区域的次数较多;但在本方法提供的现场安全警示与播报,以及后续的安全与操作规范培训的帮助下,工人进入高风险区域的次数呈波动下降趋势,后期单日稳定在10次以内。然而,在某些吊装任务繁重的日期,工人进入高风险区域的次数仍然较高,说明在此类任务期间需进一步强化安全监管措施。
5 结论
本研究提出了一种适用于钢结构作业场景下起重机与工人的空间碰撞监测方法并进行了实地应用。一方面,基于起重机的作业特点和起重机传感器技术,本研究制定了起重机工作空间危险等级划分与界定规则和起重机的位置与姿态监测方法,对中、高风险区域的监测精度范围分别为±2.600 m和±2.611 m;另一方面,本研究结合YOLO11-OBB和透视变换方法提出了现场工人的定位方法,在案例场景下,YOLO11-OBB模型精确度为0.968、召回率为0.969,在距离摄像头20 m以内工人位置定位方法平均绝对误差(MAE)、平均相对误差(MRE)和均方根误差(RMSE) 分别为67.44 mm、4.32%和86.16 mm。通过将起重机与工人工作空间的动态信息上传至三维平台,本文提出的模型实现了自动化实时监测。案例研究表明,在仅使用普通摄像头且无须工人佩戴额外监测设备的情况下,该方法在距离摄像头20 m范围内能够有效保证工人定位的准确性,并对不同危险等级的起重机空间实现差异化响应。案例项目的长期实地监测结果表明,本研究方法能有效提高作业现场的安全警示能力,降低现场工人进入起重机高风险区域的次数。
本研究也存在一定局限性。当工人与摄像头的距离较远时,YOLO11-OBB的检测性能可能下降,导致定位精度降低。此外,为保证锚点位置的稳定性,摄像头需保持平稳。未来的研究可以进一步增强对现场锚点的自动识别能力,从而提高方法的适用性和鲁棒性。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}