

随着建筑结构的日益复杂和人口的逐渐密集,提升人员室内疏散的安全性和疏散效率成为了亟待解决的问题。随着深度学习和计算机视觉技术的不断突破,疏散路径规划方法也向着高效化和智能化方向发展。传统的路径规划方法存在信息更新不及时,难以对现场情况进行实时响应等问题。因此,探索一种能够动态调整、实时反馈最优疏散路径的智能规划模型,对于提升公共安全具有重要意义。
计算机视觉技术目前已广泛应用于图像处理和无人驾驶等多个领域。2012年,Krizhevsky等[1]提出AlexNet网络,标志着现代深度卷积神经网络(dynamic convolution neural network, DCNN)的开端;2014年,Girshick等[2]提出一种基于区域的卷积神经网络的RCNN((region-based convolutional neural network)网络,能够检测出图像中多个目标的位置信息及其类别,同时能够应对各种图像分类任务;2015年,Redmon等[3-4]提出了一种单阶段目标检测算法YOLO(you only look once),其将目标检测视为一个回归问题,通过单一网络直接从图像预测边界框和类别概率,实现了实时检测和较高的检测精度,显著提升了目标检测的速度和效率;2016年,Liu等 [5]提出另一种单次多边框检测算法SSD(single shot multibox detector),通过在多个特征图上同时预测边界框和类别概率,实现了高精度和实时性的目标检测,进一步提升了检测速度和准确性。此外,在计算机视觉领域中具有代表性的多目标跟踪算法之一为Deep-SORT(deep learning based simple online and realtime tracking) [6],其在SORT(simple online and realtime tracking)算法[7]基础上,引入了深度学习中的重识别特征来提取被检测物体的外观特征,不仅使用了物体的速度和方向趋势来对目标进行跟踪,还利用物体的外观特征判断是否为同一物体。
在求疏散撤离路线的最优解方面较为常用的算法包括:蜂群算法[8]、粒子群算法[9]、蚁群算法[10]、Dijkstra算法[11-12]等。其中,Dijkstra算法因简单高效、易于实现的特点被广泛应用于寻找最短路径问题中。特别是在疏散场景下,Dijkstra算法能够快速准确地计算出从起点到终点的最短路径,确保人员能够以最快的速度安全撤离,因此本研究选择Dijkstra算法作为最短路径求解算法。国内已有不少学者利用Dijkstra算法开展相关领域研究。任少强等[13]针对城市广场在突发情况下的人群疏散问题,以人群逃离危险区域的终止时间作为权值参数改进了Dijkstra算法。刘建美等[14]利用其改进的Dijkstra算法,计算出车辆在任意时刻从任意节点位置出发到达任意目的地的最短路径及相应时间。
本研究利用深度学习算法为室内人员疏散最优路径的决策提供数据支撑,结合计算机视觉技术(SSD算法和Deep-SORT算法)和单目视觉定位测速方法,完成行人检测和多行人跟踪任务,并获取关键的人群数量和人流速度信息。接着在构建好的导航路网中规定边权计算方式,最后用Dijkstra算法得到各节点到终点的用时最短的路径。实验证明基于Dijkstra算法的室内疏散最优路径规划模型可为复杂室内场景下的疏散管理提供有效的策略指导,实现室内疏散的高效化和智能化。
1 算法原理及技术方法
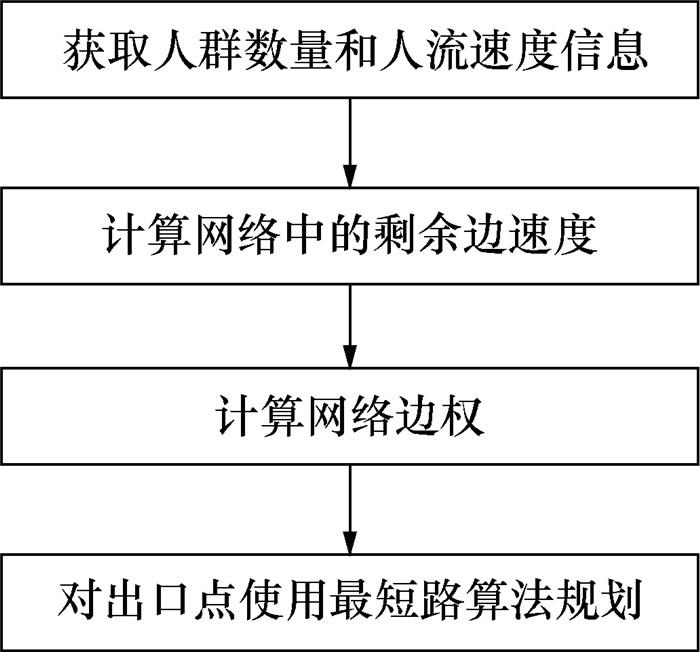
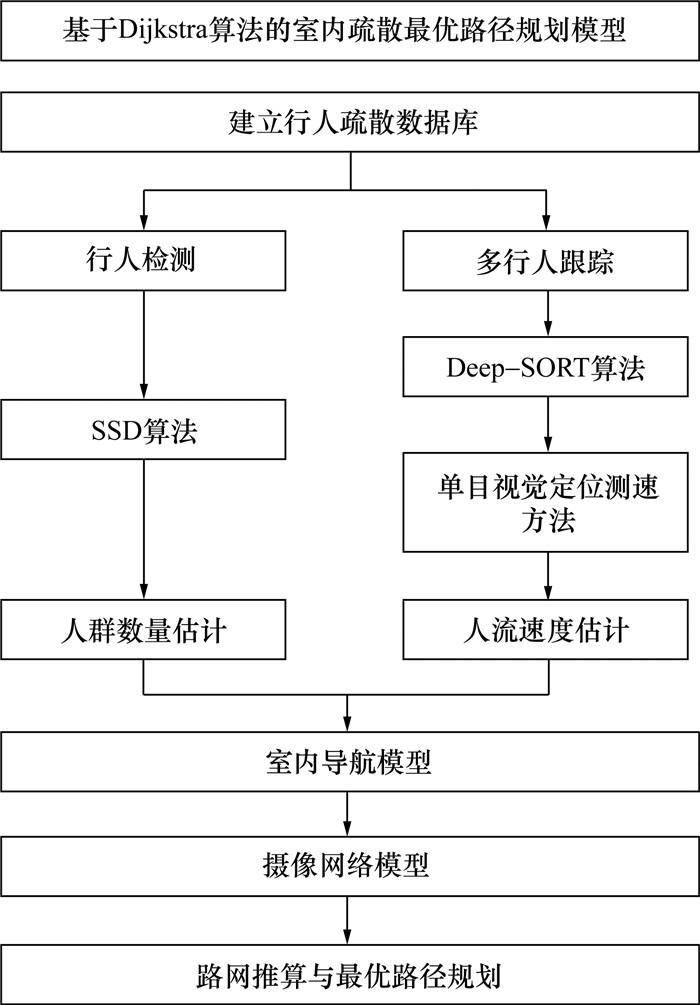
本研究通过监控手段检测人流信息,并基于Dijkstra算法得到室内疏散最优路径。基于监控检测人流的最优路径规划算法流程如图 1所示,首先利用目标检测算法和目标跟踪算法完成人群数量和人流速度信息的获取,接着计算网络中的剩余边速度和网络边权,最后利用Dijkstra算法对出口点进行路径规划。
1.1 深度学习算法
针对监控视频中人群数量和人流速度的检测,分别研究了基于深度学习的行人检测和多行人跟踪问题。通过单个摄像头拍摄室内步行街、室内走廊、室内楼梯间等多个场景中共1 416张图片,共12 529个行人标定框,覆盖多种角度、不同人群数量和遮挡情况,由此建立行人疏散数据库。
本研究采用SSD算法进行行人检测。SSD是一种基于回归的端到端的目标检测算法,结合了YOLO的回归结构和Faster R-CNN的锚点机制,在特征图中提取固定框后,直接使用位置损失和分类损失函数对预测目标的类别和位置进行训练,具有较高的识别率和检测速度。SSD算法通过在不同感受野大小的特征图中提取类别和位置信息,达到了多尺度检测的效果。
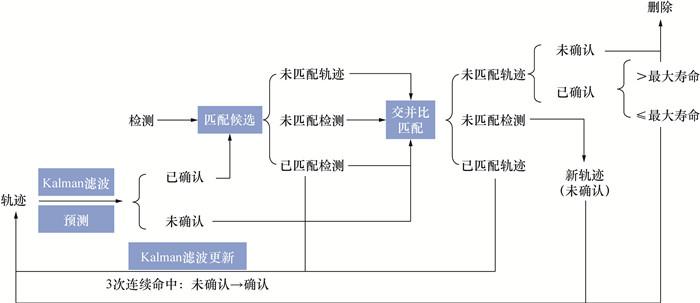
在多行人跟踪方面,采用Deep-SORT算法,通过位置关系和行人重识别深度特征对人员进行连接。Deep-SORT算法流程图如图 2所示,首先已知前一帧中所有人员的检测框信息和状态信息,算法通过预测器Kalman滤波预测下一帧中所有轨迹的状态信息,通过检测器(本研究基于SSD算法)检测下一帧中所有人员检测框信息。将检测目标和预测目标以位置关系和深度特征为关联度进行匹配连接,将两帧中的人员连接起来,完成轨迹更新。最后进一步更新预测器预测函数,接着进行下一帧的跟踪。
1.2 单目视觉定位测速方法
单目视觉定位测速方法利用单一摄像头捕获的图像序列,通过特征匹配和光流分析,实现对物体或设备自身的精准定位和速度估算。此方法依赖于识别连续图像帧间的视觉特征变化,结合尺度估计,即使在复杂环境中也能有效推断运动参数。在相机校准标定后,基于多目标跟踪结果,计算出对应像素点的实际坐标,根据监控视频帧率,得到人员速度,最终人流速度为所有人员速度的平均值。
1.3 预测边人流速度计算方法
预测边人流速度的计算首先需要使用预测边人流搜索算法,该算法的流程图如图 3所示,在导航路网模型中搜索遍历预测边并计算人流速度的算法采用广度优先搜索,初始节点集为所有可预测节点的集合,可预测节点是指该节点存在一条预测边且存在一条以上的非预测边。从当前集合中的节点为起点向预测边搜索,其中除去该节点曾经过的预测边,根据连续性定理更新预测边的人群数量和人流速度信息,当所有预测边被遍历2次后结束搜索。
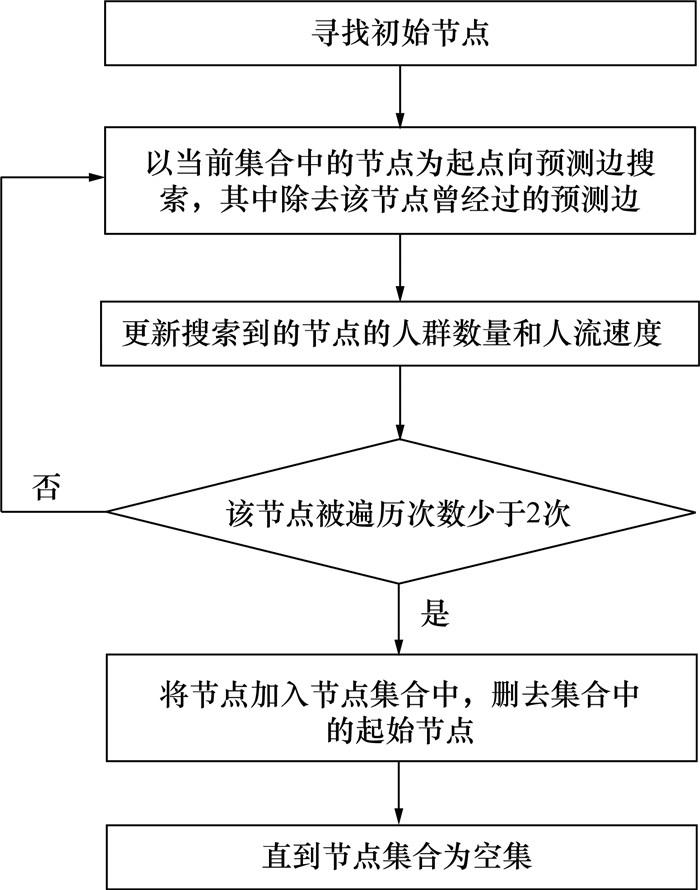
根据上述人流量计算方法,结合部分路段中摄像头检测到的人流速度和人群数量,基于连续性定理可以推算得到室内导航路网中相应预测边的人流速度。
1.4 边权计算方法
在室内导航路网中,边的权值计算与方向定义会针对普通边、转换边和电梯边进行区分。普通边权值等于边长除以行进速度,方向为疏散方向,低密度下设为双向。转换边针对易排队区域,其权值等于排队人数与单位时间通过人数之比,方向也为疏散方向。电梯边则考虑运行速度、各层排队人数及群控策略,其权值计算包含运行、开关门及乘客进出时间,方向同为疏散方向,采用最保守估计以确保安全疏散。精细化边的属性定义,有利于优化疏散路径规划,提高紧急情况下的人员疏散效率。
1.5 Dijkstra算法
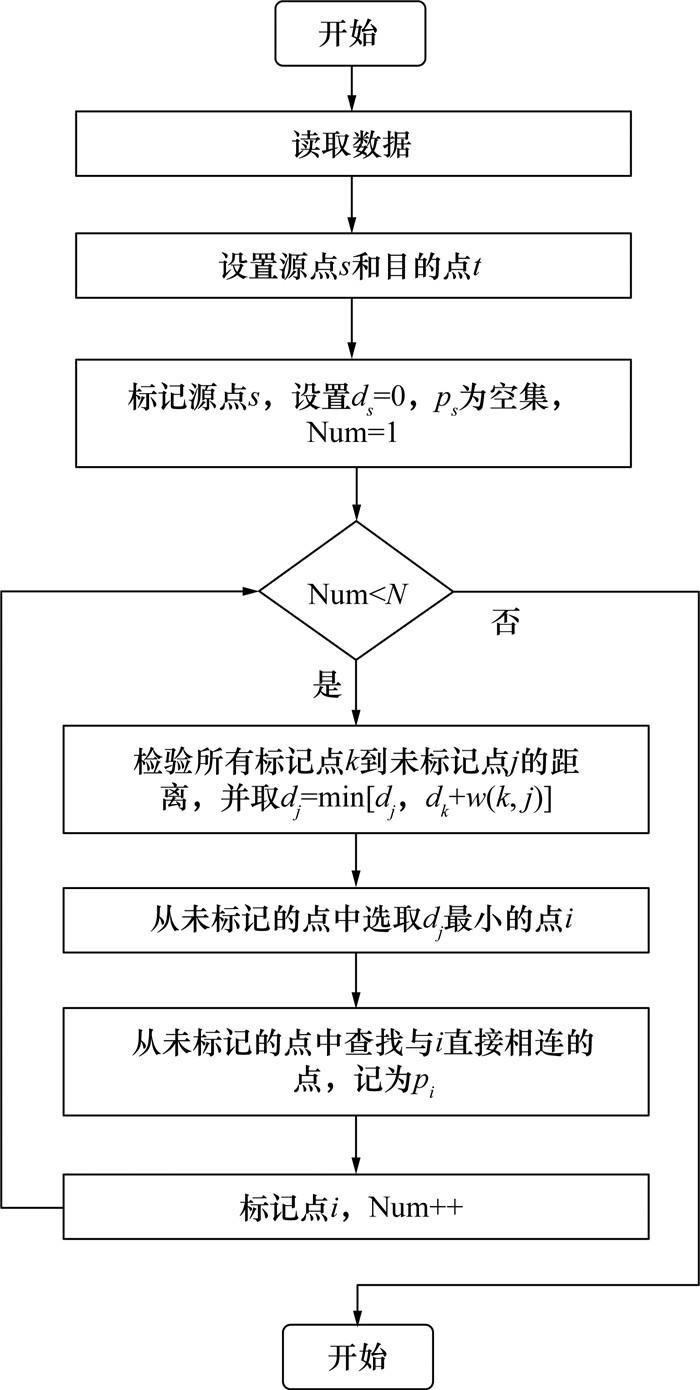
Dijkstra算法可用于对非负边的最短路径求解,利用贪心原理,从起始点出发将目前可更新的权值和最短路径更新至已访问集合中,以当前集合为起点进一步更新直至遍历导航路网图中所有节点,求出起始点到所有节点的最短路径。Dijkstra算法流程如图 4所示,其中s表示源点,即算法开始时的起点;t表示目标或目的节点;ds表示从源点s到当前节点的距离,初始时设置为0;ps表示父节点集合,用于记录到达每个节点的路径,初始时为空;Num表示当前已标记节点数,初始时设置为1;N表示需要标记的总节点数;k表示当前正在检查的已标记节点;j表示未标记节点;w(k, j)表示边(k. j)的权重,即从节点k到节点j的距离或成本;dj表示从源点到未标记节点j的最小距离;pi表示与节点i直接相连的点;dj=min[dj, dk+w(k, j)],其中min函数来确定从当前点到下一个点的最短路径,dk表示从源点到当前正在检查的已标记节点k的最小距离,dk+w(k, j)表示从源点通过点k到达点j的距离;“Num++”是一个自增操作符,表示将变量Num的值增加1,在算法流程中,Num可能用于记录已经处理过的节点数量或迭代次数,当算法找到一个新的最短路径并标记相应的点后,会执行“Num++”操作,表示已经处理了一个新的节点。
2 模型搭建
2.1 总体模型
基于Dijkstra算法的室内疏散最优路径规划模型由算法模型、摄像理想模型、室内导航模型、摄像网络模型组成。总体模型的架构如图 5所示。由图可知,本研究首先通过数据采集建立行人疏散数据库,接着利用深度学习技术与单目视觉技术,从建筑监控视频中精准提取出人群数量和人流速度等关键信息。同时,依据工业基础类(industry foundation classes, IFC)标准,提取了建筑内部的空间结构信息,构建了专为疏散设计优化的路径网络。此外,在导航路网中结合相对应的摄像网络模型,最终实现室内疏散路网推算和最优路径规划,解决了疏散路径的动态优化问题。
2.2 摄像理想模型
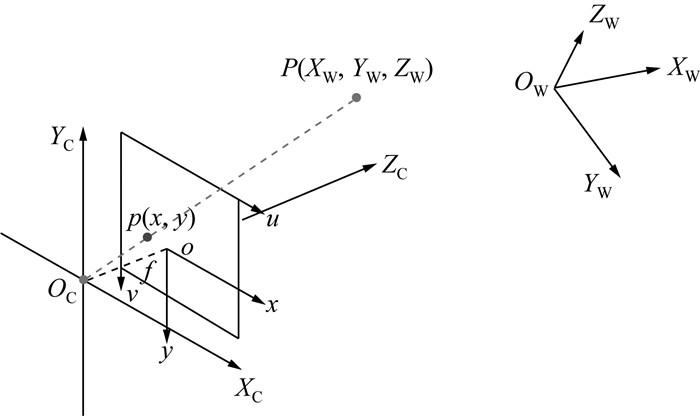
根据传感器数量可分为单目、双目和多目的视觉测量,本研究中的监控系统为单目视觉系统,虽然其标定参数对结果的影响十分敏感,但因具有经济实用、标定方法简单等优点被广泛应用。在单目视觉系统中的相似模型为小孔成像模型,三维空间中的点通过小孔成像的方式投影到图像中。
摄像机理想模型用于将图像像素坐标转换成真实世界坐标,在小孔成像模型中是由4个坐标系间的坐标转换完成的,如图 6所示,其中OW-XW-YW-ZW坐标系为真实世界坐标系,用于描述真实世界中目标的绝对位置;OC-XC-YC-ZC坐标系为相机坐标系,坐标系的原点为相机的光心OC,用于描述图像平面与真实坐标间的相似关系;O-x-y坐标系为成像平面坐标系,原点O为光心在图像上的投影;u-v坐标系为像素坐标系,描述目标在图像中的像素坐标;f表示相机焦距,即从相机坐标系原点OC到图像平面的距离;p(x, y)表示图像坐标系中的一个点p,其坐标为(x, y);P(Xw, Yw, Zw)表示世界坐标系中的对应点P,其坐标为(Xw, Yw, Zw)。
2.3 室内导航模型
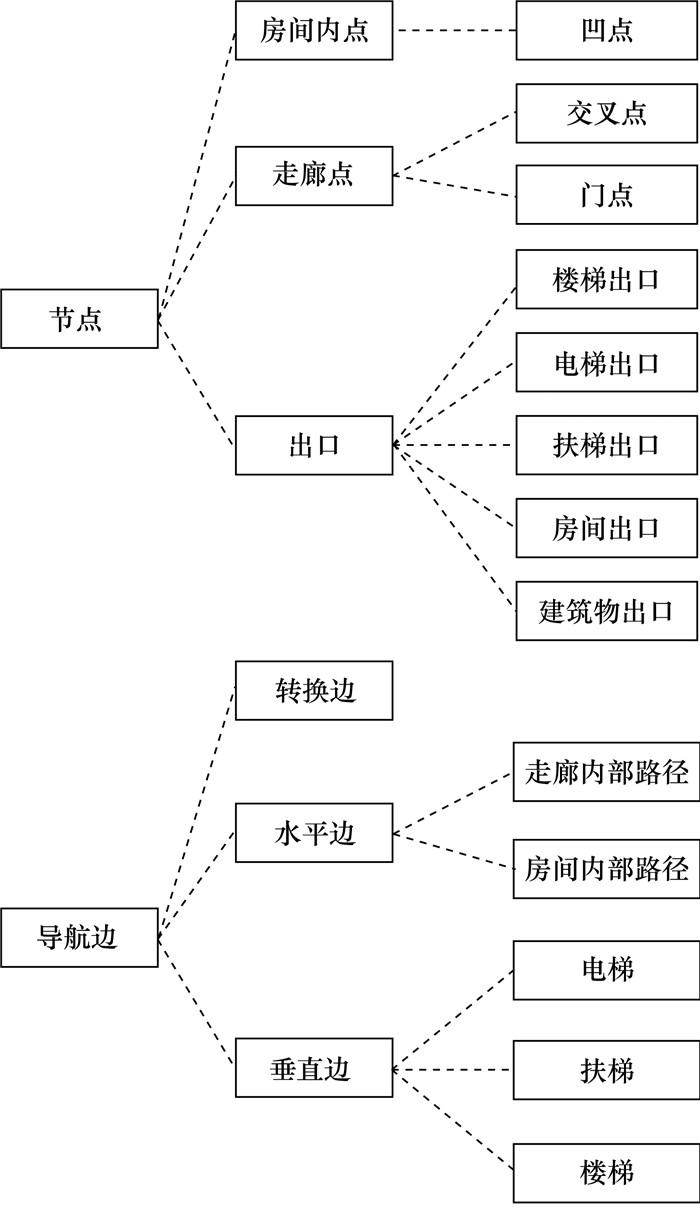
建筑信息模型(building information modeling, BIM)领域包含许多的标准,IFC标准就是BIM的一种公开的、基于对象的文件交换格式,详尽描述了建筑构建的几何、语义和属性等信息[15]。本研究基于IFC标准,提取室内导航需要的房间、走廊、楼梯、门及其相关功能建筑空间对象的信息。
主要建筑构件的空间对象及其对应IFC实体类型主要有墙体(IfcWall、IfcWallStandardCase)、门(IfcDoor)、楼梯(IfcStair、IfcStairFlight)、楼层(IfcBuildingStorey)和走廊房间(IfcSpace)。从IFC文件中提取室内导航所需要的信息,方法如下:遍历所有IFC建筑要素判断是否为所需要素,如果是,提取要素的几何、语义和属性信息,直至遍历完所有的建筑要素。
2.4 摄像网络模型
摄像网络模型包括水平监控摄像网络模和垂直监控摄像网络模型。根据疏散规律,在某一个含n条分支路网的节点处,已知n—1条分支的人员行走速度和人员数量,结合连续性定理可得出剩余1条分支的人员行走速度和人员数量,此种预测方式可以减少布置监控摄像头的个数。本研究中约定预测边的非传递性,即当这条边的数据是预测数据时,该数据不能用于其他边的预测,有效避免了误差被再次放大。
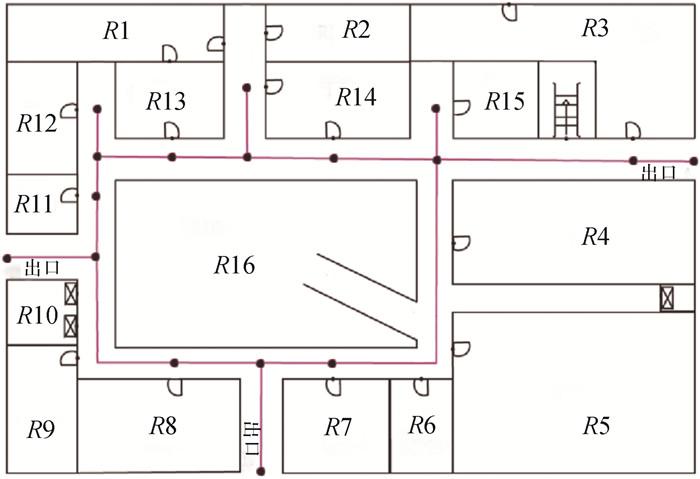
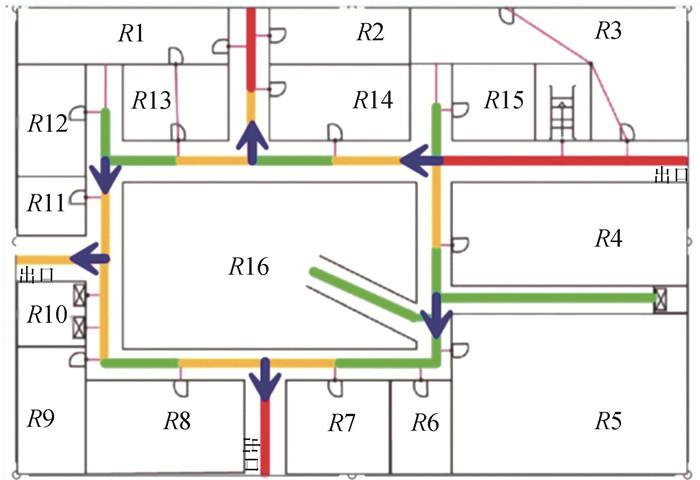
将水平导航路网简化成监控摄像网络,具体方法如下:删去水平导航路网中二叉节点、符合条件的缓冲节点;将2个走廊节点间的门节点合并成1个节点;删去符合条件的流入节点。某一楼层的水平监控摄像网络如图 8所示,其中R1—R15表示房间,R16表示楼梯间,黑点表示监控摄像网络的节点,红线表示导航边。
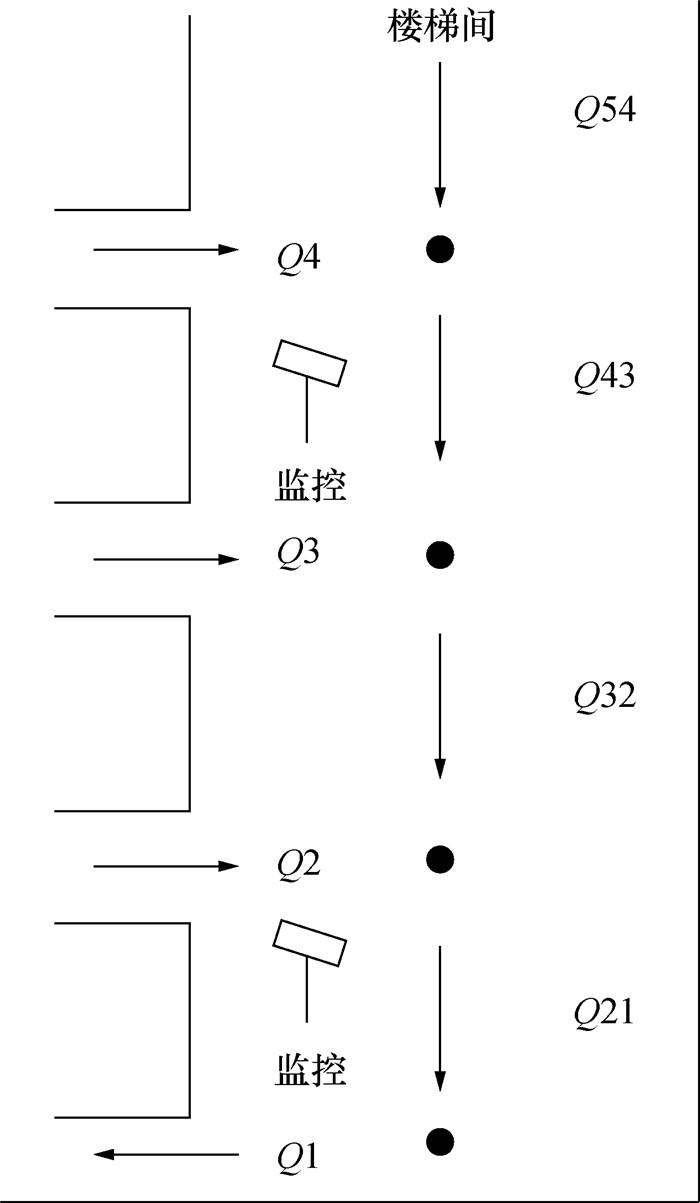
垂直监控摄像网络主要是指楼梯间的网络。楼梯间监控摄像布置与水平面不同,通常监控摄像的设置方式是采用定向摄像头监控某一阶梯,不使用全方位摄像头。而且楼梯是连接楼层之间路径,层与层之间人流量变化明显。因此,根据预测边不能传递的特性,楼梯间监控从底层开始,每隔一层布置一个监控,中间楼梯的人流可以通过预测得到,如图 9所示,其中Q1—Q4分别为对应4条路径中的人流量,Q54、Q43、Q32、Q21分别为Q5到Q4、Q4到Q3、Q3到Q2、Q2到Q1的人流量。
3 实验验证
3.1 实验情景
本研究中行人疏散数据库包含在室内步行街、室内走廊、室内楼梯间等多个场景中通过单个摄像头拍摄的1 416张图片,共有12 529个行人标定框。为验证基于Dijkstra算法的室内疏散最优路径规划模型的实际性能,开展测试实验。测试实验以某宿舍楼为情景,在楼内的楼梯间和楼道内相应布置摄像头进行监控,将监控视频数据存入行人疏散数据库,数据库图片示例如图 10所示。

3.2 实验结果分析
利用本文1.1—1.5节中提出的行人检测、多行人跟踪和Dijkstra等算法,并基于构建的导航路网模型,选取了本研究数据库收集的图片作为输入数据进行实验,测试该模型在最优路径规划方面的实际性能。
在获得行人疏散数据库中视频检测到的人群数量和人流速度的数据后,推算无摄像头路径的人群数量和人流速度,存入数据库中。如图 12所示,其中红色线条区域表示拥挤,橙色线条区域表示较为拥挤,绿色表示通畅。利用全路网的流速计算最短路,在每一个决策节点处显示最优路径方向,如图中蓝色箭头所示。
3.3 理论验证分析
本研究所使用的模型在实际运用中的准确性主要取决于输入数据的可靠性,即人群数量和人流速度数据与实际数据的偏差。当输入数据与实际偏差小于25%时,认为基于Dijkstra算法得到的最优疏散路径规划结果也具有很高的可靠性。
在本研究中,人群数量和人流速度数据主要来源于所使用的深度学习算法,其在自制的行人数据库的测试性能表现如下:用于行人检测的SSD算法的平均精度(average precision, AP)为78.2%;用于多目标跟踪的Deep-SORT算法的多目标跟踪精确度(multiple object tracking precision, MOTP)和多目标跟踪准确度(multiple object tracking accuracy, MOTA)分别为71.2%和78.5%。检测算法和跟踪算法在测试集上的表现优异,为室内疏散最优路径规划工作提供了较高准确度的人群数量和人流速度数据,确保了模型在实际应用中的有效性和可靠性。通过综合考虑人群数量和人流速度等因素,本模型能够实现最优疏散路径的实时更新,从而在紧急疏散场景中发挥重要作用。
4 结论
本研究针对监控视频中人群数量和人流速度的检测问题,利用SSD算法进行行人检测,确定人员坐标和身份,并准确识别人群数量。基于Deep-SORT算法及单目视觉定位测速方法,完成多行人目标的身份跟踪,并准确估计当前人流速度。同时,针对最优路径规划问题研究了导航路网的构建、摄像头布置策略和最优路径计算方法。最终完成基于Dijkstra算法的室内疏散最优路径规划模型的构建。实验结果表明,该模型可在每一个决策节点处动态显示当前最优路径方向,在一定程度上提高了疏散效率与安全性,实现最优路径规划的高效化和智能化。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}