

人在进行运动时,身体会产生加速度;在进行特定肢体动作时,特定部位会产生加速度[5-7]。通过分析加速度数据,可以判断人体的运动状态。已有学者基于加速度研究了人体的运动状态识别。Gorlatova等[8]利用质量-弹簧-阻尼系统模型,将人体运动时的加速度数据转换为能量数据,并创建了一个名为CRDWDAD的公共加速度数据库,从而为基于人体运动能量的动作识别开辟了研究路径。Alzantot等[9]根据加速度的幅度特征,将步行过程中的加速度变化划分为6个阶段。苏婷[10]提出了一种基于信号频域特性的方法,用于识别躺、站直、坐、走路和跑5种常用姿态。Hao等[11]开发了利用三轴加速度传感器识别人体运动的系统,可以识别日常运动行为。以上研究通过加速度成功识别了人员的运动状态,但是识别的主要为人员的日常运动状态,并未对特殊运动状态进行识别。
在基于加速度进行人员运动状态识别领域中,研究者们为了能够获取更为全面的运动数据,往往在人体多个部位安装加速度传感器,以提高识别率。例如,余杰等[12]基于胸部、腿部、手部和手提包处的加速度数据集提出了一种较为泛用的人员运动状态识别模型,该模型可以在一定程度上提高运动识别率,但传感器数量较多,大大提高了穿戴负担。
本文基于以上研究,考虑救援场景的特殊性,提出了基于三轴运动数据的救援人员运动状态识别方法。根据救援人员在救援过程中可能出现的运动状态,区分了静止、原地作业、行走、奔跑4种运动状态。为满足可穿戴性以及识别准确度要求,通过MPU6050传感器采集腰部和腿部的加速度。考虑到救援人员监测的实时性要求,采用时域特征分析方法,利用加速度标准差对人员运动状态进行识别,建立三轴数据与救援人员运动状态的关系,最后形成基于三轴运动数据的救援人员运动状态识别方法。
1 三轴运动数据采集
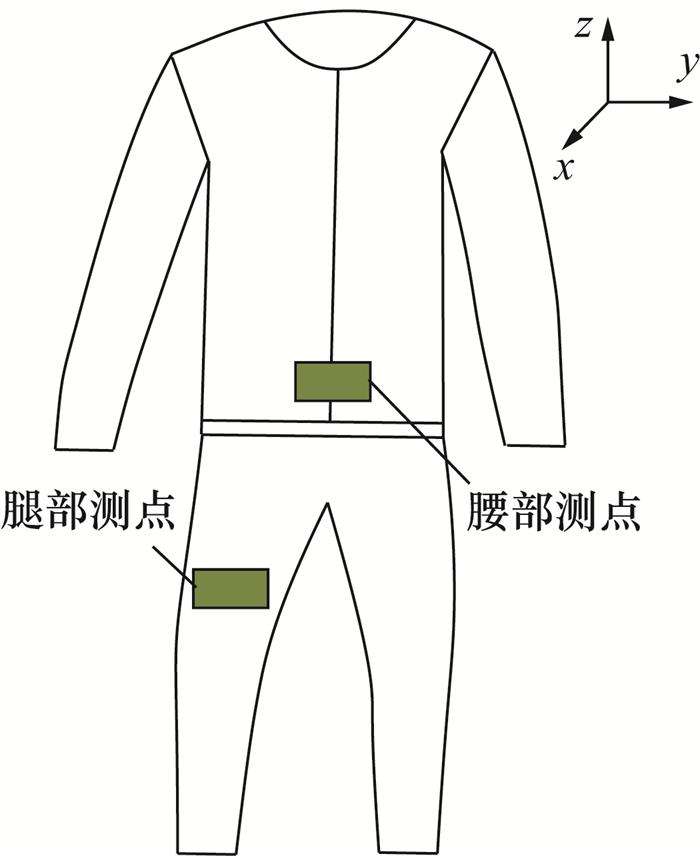
在监测人体活动时,传感器的安装位置对收集到的加速度原始数据以及最终的运动状态分析有着显著影响。将传感器置于头部,可以很好地监测头部姿态变化,便于观察周围情况,但这种方法无法记录人体的全身动作。相比之下,将传感器安装在腰部或脊柱上,更适合于监测全身的运动,无论是行走还是奔跑,都能提供较为准确的全身运动数据,特别适合于监测复杂地形中的活动。将传感器固定在手臂或手腕上,则更适合于追踪手部动作,适合于监测操作工具等活动,但无法全面反映人员整体的运动状态。将传感器安装在腿部或脚踝上,则能够有效地监测走路和奔跑动作[16]。
为实现对救援人员运动的全面和精确监测,本研究将MPU6050传感器分别安装在腰部与腿部,如图 1所示。这种布置能够同时捕捉到全身姿态和细节动作。置于腰部的传感器能够记录整体的身体运动和姿态调整,对于分析救援人员在多变环境下的行动模式非常关键;腿部的传感器则专注于步态的细致分析和运动协调性的评估,可以提供更多维度的运动数据。通过整合这两个部位的传感器三轴加速度数据,能够更深入地分析人体的运动状态。
在使用MPU6050传感器进行数据采集之前,先进行校准。校准采用零偏校准法,即在传感器静止状态下收集一定时间的数据,本研究进行了100次采样。对于加速度传感器,需要计算其x、y、z 3轴的平均加速度值,并以此作为零偏补偿值。对于陀螺仪传感器,同样需要将零偏值应用于相应的轴上。表 1展示了传感器在未校准和校准后,在静止状态下收集的部分数据对比情况。可以发现,z轴的数据在未校准时很大,这是由重力作用导致的,而校准可以有效消除重力作用的影响。校准对x轴和y轴测量结果也有很大改善,校准后各轴加速度均接近0 m/s2。
表 1 MPU6050传感器校准前后加速度数据对比 |
| 未校准 | 校准后 | |||||
| x轴/(m·s-2) | y轴/(m·s-2) | z轴/(m·s-2) | x轴/(m·s-2) | y轴/(m·s-2) | z轴/(m·s-2) | |
| 1.276 | 0.738 | 15.296 | 0.036 | -0.028 | -0.004 | |
| 1.216 | 0.811 | 15.196 | -0.024 | 0.043 | -0.105 | |
| 1.306 | 0.816 | 15.241 | 0.065 | 0.049 | -0.062 | |
| 1.246 | 0.686 | 15.264 | 0.005 | -0.080 | -0.036 | |
| 1.208 | 0.778 | 15.224 | -0.032 | 0.011 | -0.076 | |
| 1.262 | 0.754 | 15.294 | -0.112 | -0.012 | 0.067 | |
2 基于时域特征的救援人员运动状态识别方法
2.1 不同运动状态下三轴运动数据分析
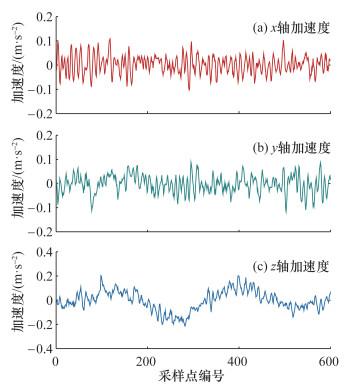
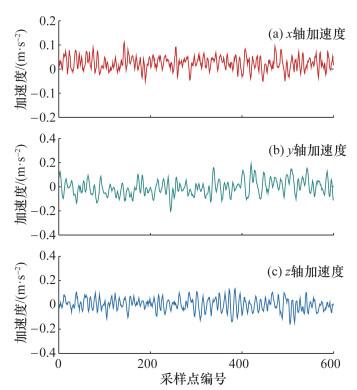
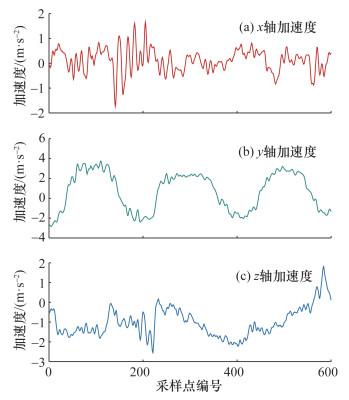
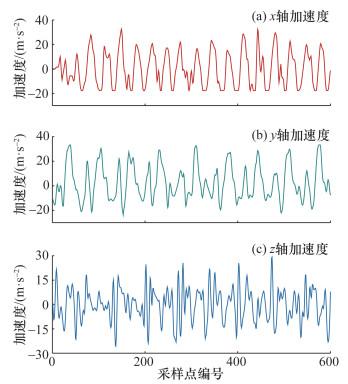
在执行救援任务时,救援人员可能会经历多种不同的运动状态。从MPU6050传感器收集的加速度数据中,可以观察到不同运动状态下传感器输出的腰部和腿部加速度。
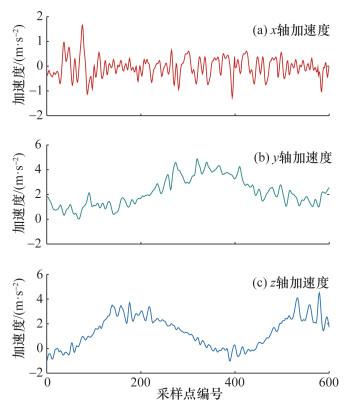
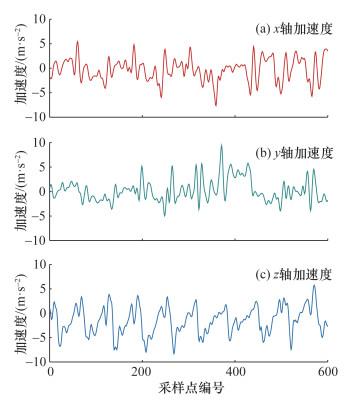
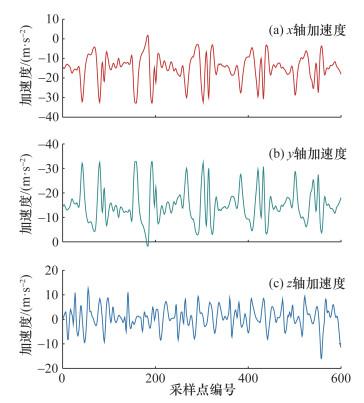
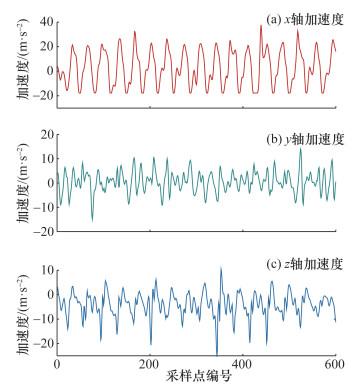
2.2 不同运动状态下三轴加速度时频特征分析
从2.1节对不同运动状态下三轴加速度的分析中可以看到,4种运动状态下加速度分布均有不同的特点,尤其是奔跑状态和行走状态下均呈现规律性的重复和周期性变化,只在幅值和频率上表现出差异。
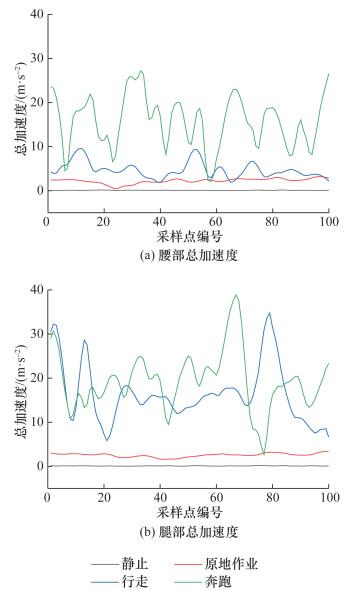
在此基础上,本文引入总加速度特征分析。总加速度由三轴加速度合成,
式中:a表示总加速度,ax、ay和az分别对应x轴、y轴和z轴加速度。
图 10展示了不同运动状态下总加速度的对比分析结果,选取600个采样点中的前100个绘图。通过分析腰部与腿部的总加速度的时域特性,可以区分救援人员静止、原地小范围作业、行走和奔跑4种不同运动状态。静止状态下,总加速度基本维持在0 m/s2,救援人员的腰部与腿部总加速度值接近于零,这表明他们没有进行任何运动。原地小范围作业时,腰部与腿部总加速度均大于零,但是保持在小范围内,且波动较为平稳;行走状态下,腰部和腿部总加速度存在较大的差异,腰部加速度呈小范围波动,数值维持在较低水平,而腿部加速度波动较大,存在明显的波峰和波谷;奔跑状态下,腰部和腿部总加速度均呈现较大波动,且腿部加速度波动幅度更大。
标准差σ的定义为
其中:xi是每个数据点的值,n是数据点的数量,${\bar x}$是平均值。
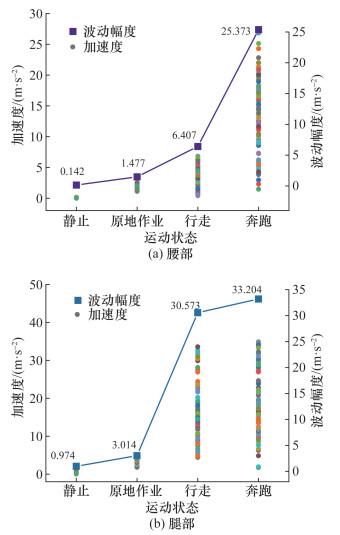
标准差反映了数据点相对于平均值的分散程度,即标准差越大表示数据的离散程度越高[22]。在对静止、原地作业、行走和奔跑这4种运动状态的各50组数据进行标准差分析后,本研究发现不同运动状态下标准差的分布呈现出明显的层次性。这种分布特征表明,标准差在不同运动状态之间具有显著的区分度,其值在各个运动状态间明显不同,显示出不同运动状态下加速度波动的显著差异。
基于加速度波动的显著差异,可以通过设定合适的阈值来准确区分各种运动状态。通常情况下,较高的标准差反映出较大的波动幅度和不稳定性,而较低的标准差则反映出较为平稳的状态。基于此,本文在标准差的基础上构建一个高效的分类机制,以识别和区分不同的运动状态。从50组数据中选取10组代表性数据绘制散点图,救援人员腰部和腿部不同运动状态下加速度波动标准差如图 12所示。
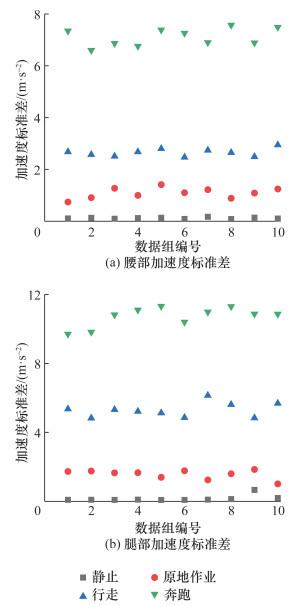
从图 12中可以明显看出,无论是腰部还是腿部的加速度标准差,都能有效地区分出4种不同的运动状态。为进一步提升运动状态识别的精确度,并减少在原地作业时可能出现的偶然性影响,本文进一步采用腰部和腿部加速度标准差之和作为区分不同运动状态的依据。这种方法的优势在于综合了腰部和腿部的加速度数据,从而更全面地捕捉运动状态的特征。标准差之和的定义为
其中:σs表示标准差之和,σ1为腰部加速度数据的标准差,σ2为腿部加速度数据的标准差。
通过结合腰部和腿部的加速度标准差,本文提出的方法能够降低单一数据源可能带来的不确定性,增强分类结果的稳定性和精确度。不同运动状态下腰部和腿部加速度标准差之和区分标准值如表 2所示。
表 2 不同运动状态下加速度标准差之和区分标准值 |
| 运动状态 | 加速度标准差之和区分标准值/(m·s-2) | 波形特征 |
| 静止 | 0.0~0.5 | 接近于零,波动较小 |
| 原地作业 | 1.0~5.0 | 非周期性升降 |
| 行走 | 8.0~12.0 | 较小幅度的周期性波动 |
| 奔跑 | >15.0 | 较大幅度的周期性波动 |
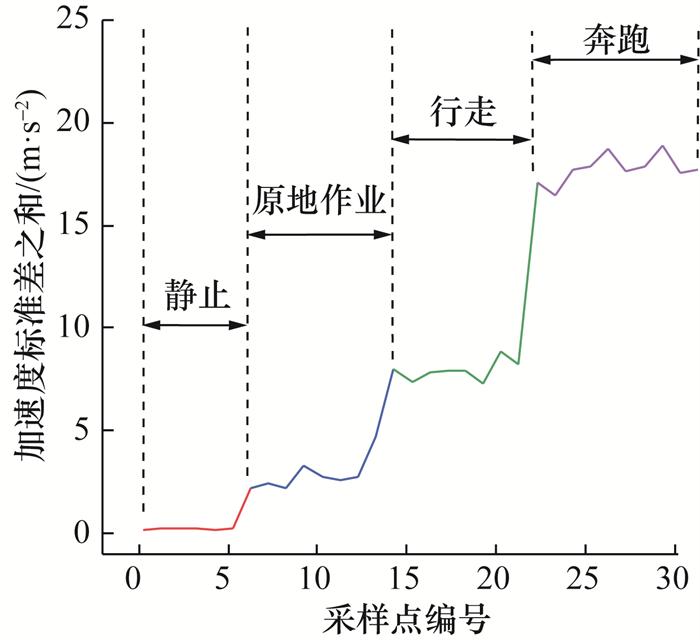
为测试本文所提方法的有效性,在试验环境下由同一位被试模拟救援人员行为,开展了2 min内不同运动状态的切换测试。每4 s采样一次,测试结果曲线如图 13所示。可以看到,本文方法可以有效地计算出运动状态改变带来的标准差之和的变化,且有很明显的区分度。模拟结果表明,本文所提方法可以有效实现对运动状态的识别,为救援人员的运动状态监测提供了可靠的技术支持。
3 结论
本文将人员运动状态识别应用在救援人员安全识别场景中,提出一种基于三轴运动数据的救援人员运动状态识别方法。针对救援人员对设备可穿戴性和监测实时性的要求,利用MPU6050传感器采集腰部和腿部加速度数据,分析了静止、原地小范围作业、行走和奔跑4种运动状态下的加速度数据,并基于时域特征分析提出了一种有效的分类方法。该方法通过结合腰部和腿部的加速度标准差来提高运动状态识别的准确性和稳定性。通过试验环境下的识别测试验证了该方法的有效性,测试结果表明该方法能够实时监测并准确判别救援人员的运动状态。该方法为救援行动中人员安全监控提供了有效的技术手段。
本文数据采集是基于试验环境,采用普通人员模拟救援人员的运动状态,且被试人数很少。实际情况中,救援人员的运动状态更为复杂。未来将考虑更为精细、复杂的救援人员运动状态识别,以提高所提出的识别方法的实际适用性。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}