

并联机构具有负载大、刚度高等特点,在应用中如何充分发挥其性能优势成为近年来的研究热点。速度快、效率高的Delta并联机器人[1],可进行空间6自由度复杂运动的Stewart机器人[2],基于Tricept混联机构的并联机床[3]分别在快速拾取、运动模拟及加工制造等高精度领域得到了广泛的应用。本文以Delta并联机器人为研究对象,其运动学和动力学性能优越,被广泛应用于物料分拣包装和电子产品加工装配等领域[4-5],机器人定位精度是影响产品性能的主要因素[6]。然而,实际应用中,由零件加工精度、装配质量、关节间隙及传动系统误差引起的不确定性,限制了并联机器人在要求严格精度的任务中的应用[7]。因此,深入探究并联机器人的误差建模理论与方法,以提升其定位精度,已成为亟待解决的关键科学问题之一,对提高机器人性能具有重要意义。
为研究并联机构的实际运动学特征,国内外学者在机构误差建模过程中应用了不同的数学方法。常用的方法有D-H参数法[8-9]和空间矢量法[10-12]。贺礼等[13]采用D-H方法建立了Delta机器人的误差模型,为Delta机器人的精度分析及误差补偿提供了分析工具,但是D-H参数法在建模过程中存在奇异性的问题。张文昌等[14]采用空间矢量法建立了Delta机器人的误差模型,完成了机器人运动学误差标定,但是使用运动学逆解方法构建的误差模型需要对部分结构进行理想假设,因此无法保证模型中包含所有潜在的误差源。近年来,利用指数积(product of exponentials,POE)公式建模的POE方法已被广泛应用于并联机器人的运动学描述,相比于D-H参数法和空间矢量法,基于旋量理论的POE方法充分利用了机器人的几何特性,物理意义明确,建立的模型表达更加清晰。根据Chasles定理,空间中物体的任意刚体运动可以等效为螺旋运动,即绕某轴的转动和沿平行某直线的移动。可以通过平滑改变旋量坐标来避免运动产生的奇异性问题,保证了采用POE方法建立模型的连续性,并且同时符合完整性和最小化的要求。Okamura和Park[15-16]采用全局POE方法建立了开环机械手的误差模型,在二者基础上,He等[17]进一步推导了指数映射关于关节旋量和关节变量微分的显式表达式,以加法的形式呈现。此外,Chen等[18]通过为每个杆件分配局部坐标系,结合局部POE方法分析了机构的误差。现有研究成果证明了旋量理论在并联机器人误差建模方面的优越性,但目前在Delta并联机器人误差建模及误差分析方面有待进一步研究。
本文基于旋量理论,采用POE方法对Delta机器人进行误差建模研究,并依据提出的运动学误差模型分析Delta机器人各项误差源对机器人位置精度的影响规律,为后续误差补偿研究提供理论支撑。
1 旋量理论及局部POE方法
1.1 旋量理论
旋量理论由于其简洁的几何形式,与其他数学方法如Lie群Lie代数理论相结合后,逐步发展形成旋量理论体系,现如今已广泛应用于工业机器人运动学分析,常见相关符号和术语的定义如下:
① SO(3)为Lie群中的三维旋转群,是所有3×3实数矩阵R的集合,刚体的旋转变换用旋转矩阵R表示;
② so(3)为Lie群SO(3)的Lie代数,表示所有3×3反对称矩阵的集合;
③ SE(3)为Lie群中的齐次变换矩阵群,是所有4×4实数矩阵T的集合;
④ se(3)为Lie群SE(3)的Lie代数;
⑤ $\boldsymbol{\omega} \in \Re^3$ 表示关节旋转轴的单位矢量,即ω =(ωx,ωy,ωz)T,$\|\boldsymbol{\omega}\|_2=1$ ;
⑥ $\hat{\boldsymbol{\xi}} \in \mathrm{se}(3)$ 为4×4的运动旋量矩阵,表示Euclid群的一个无限小生成元;
⑦ $\boldsymbol{\xi}=\left(\boldsymbol{\omega}^{\mathrm{T}}, \boldsymbol{v}^{\mathrm{T}}\right)^{\mathrm{T}}$ 表示$\hat{\boldsymbol{\xi}}$ 的6维矢量形式的运动旋量坐标。
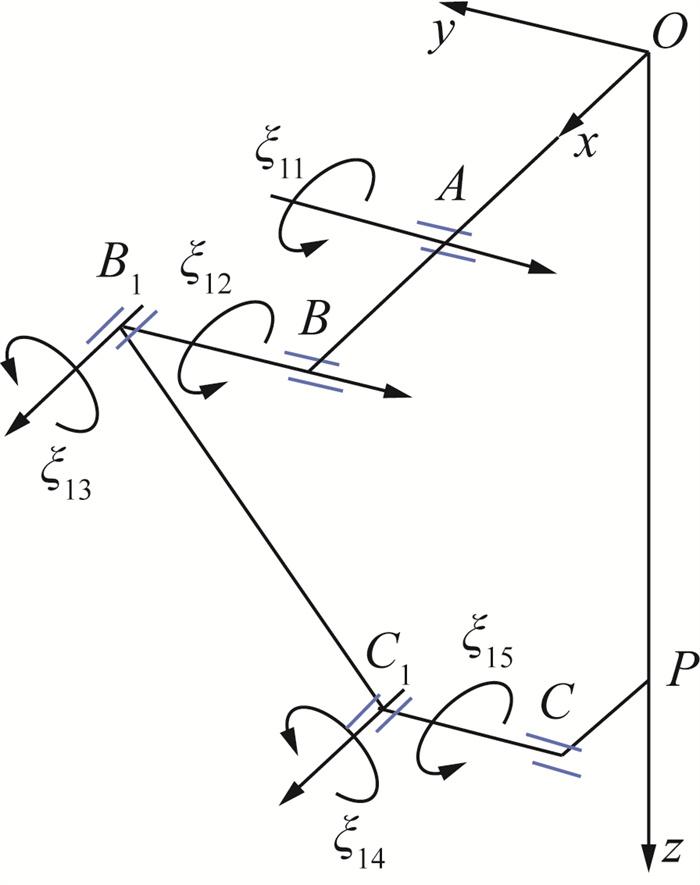
螺旋运动如图 1所示,螺旋运动的无穷小量称为运动旋量,对应的运动旋量$\hat{\boldsymbol{\xi}}$ 定义为
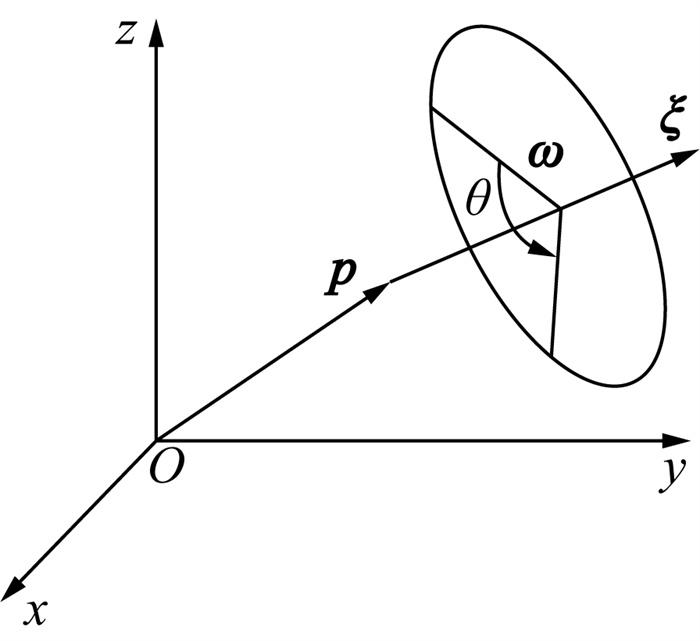
其中:$\hat{\boldsymbol{\omega}}$ 表示旋转方向ω从三维矢量空间到反对称矩阵空间so(3)的映射,将矢量转化为反对称的运算定义为算子“∧”,即
其中:v为螺旋运动中关节单位方向向量,$p \in \Re^3$ 为旋转轴上的任取一点。算子“∨”是“∧”的逆算子,可以将$\hat{\boldsymbol{\xi}} \in \operatorname{se}(3)$ 映射为六维向量ξ,即运动旋量Plucker坐标形式。
对于转动关节和移动关节,ξ的运动旋量坐标如表 1所示。
表 1 运动旋量坐标表示 |
| 运动副形式 | 旋量坐标 |
| 转动副 | (ωT,(p×ω)T)T |
| 移动副 | (01×3, vT)T |
注:v表示关节单位方向向量。 |
1.2 基于局部POE方法的运动学建模
任意刚体变换矩阵都可以写成某个运动旋量的指数形式[23],即为
其中:ω为非零矩阵,I3表示三阶单位矩阵,$\mathrm{e}^{\widehat{\boldsymbol{\omega}} \theta}$ 由Rodrigues公式得
当物体运动为纯移动时,$\|\boldsymbol{\omega}\|_2=0$ ,则变换矩阵可以表示为
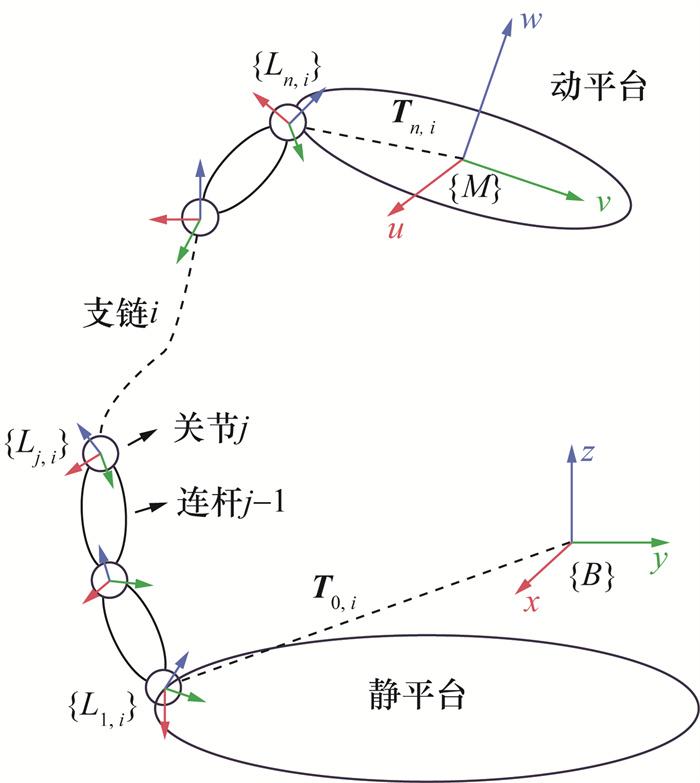
在第j个关节轴线处建立坐标系{Li, j},定义关节(j-1)至关节j的变换矩阵为Ti, j,假设其关节轴线方向为ωij,关节速度为vij,当关节沿轴线运动qij时,由式(5)可得,{Li, j+1}相对于{Li, j}的变换矩阵Ti, j为
对于多自由度的关节,其关节运动可以等效为多个单自由度关节运动的依次累加,基于式(8)对于关节变换的描述,从基坐标系{B}到末端坐标系{M}的运动学方程为
式(9)即为采用局部POE方法建立的并联机器人支链i的运动学模型,T ∈SE(3)为机器人末端坐标系{M}相对于基坐标系{B}的变换矩阵。
2 Delta机器人运动学模型
2.1 Delta机器人结构与参数
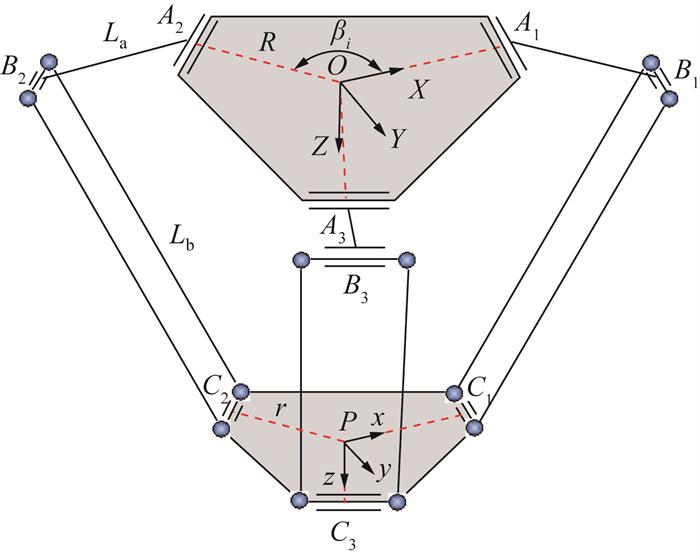
理想情况下,由Delta机器人模型可知,静(动)平台各铰接点与原点的连线相对X(x)轴的角度为
2.2 Delta机器人支链模型的简化
由于Delta机器人支链并非串联结构,其从动臂由一个平行四边形结构组成,因此在采用局部POE方法建立Delta机器人运动模型之前,需要对Delta机器人进行简化分析,四边形的4个顶点由球面副连接,每个球面副可以看成是由3个转动副组成的,以B为原点,B关节轴线方向为x轴,垂直向下为z轴,建立坐标系,如图 4所示。
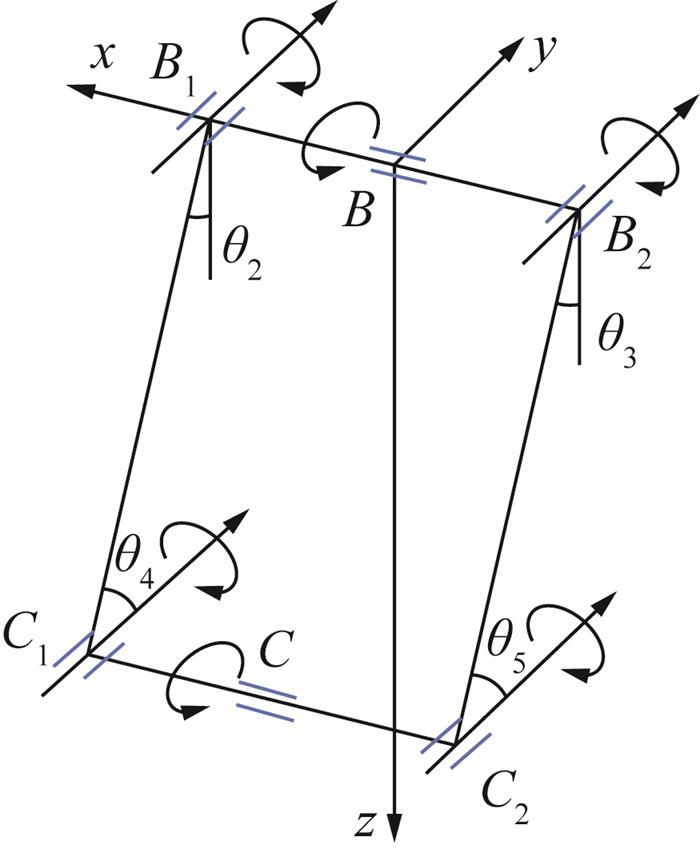
将各球面副以x, y, z为轴线分解出3个转动副,其中绕x轴的2个转动副和转动副B、C合并,各关节转角分别为θ2、θ3、θ4、θ5。设初始位形为角度为0的位置,B1B2和C1C2的长度为2a,在参考坐标系下各关节旋量如表 3所示。
表 3 四边形结构的旋量参数 |
| 关节 | 旋量轴线位置 | 各关节旋量坐标 |
| B1 | (a, 0, 0)T | (0, 1, 0, 0, 0, a)T |
| B2 | (-a, 0, 0)T | (0, 1, 0, 0, 0, -a)T |
| C1 | (a, 0, Lb)T | (0, 1, 0, -Lb, 0, a)T |
| C2 | (-a, 0, Lb)T | (0, 1, 0, -Lb, 0, -a)T |
由POE方法可得四边形机构的运动方程[25]为
其中:ξB1、ξB2、ξC1、ξC2分别为转动副B1、B2、C1、C2的运动旋量。
整理可得
将表 2中的参数代入式(12)可得
通过以上分析,该平行四边形机构可以等价为关节B1C1的串联机构,以此简化支链运动学求解,如图 5所示。
2.3 基于局部POE方法的Delta机器人运动学模型
根据图 5所示Delta机器人单支链结构,分别在各关节处建立局部坐标系,将基坐标系O-XYZ命名为{L0},Ai处的坐标系命名为{Li, 1},依此类推,机器人末端坐标系P-xyz命名为{Li, 11}。按照相邻坐标系变换的实际意义,分为机器人结构变换矩阵和关节变换矩阵。
考虑Delta机器人3条支链为对称分布,对于支链1的第j个关节,其关节轴线和关节位置分别为ω1j、p1j,依此类推,支链i上相应位置关节j的关节轴线和关节位置则分别为
其中R (φi)为支链i相对于支链1绕Z轴旋转φi角度的旋转矩阵,即
表 4 结构变换矩阵旋量坐标及运动变量 |
| 变换矩阵 | ξij | qij |
| T1, 1 | (0, 0, 0, 1, 0, 0)T | R |
| T1, 3 | (0, 0, 0, 1, 0, 0)T | La |
| T1, 5 | (0, 0, 0, 0, -1, 0)T | a1 |
| T1, 7 | (0, 0, 0, 1, 0, 0)T | Lb |
| T1, 9 | (0, 0, 0, 0, 1, 0)T | a2 |
| T1, 11 | (0, 0, 0, -1, 0, 0)T | r |
表 5 关节变换矩阵旋量坐标和运动变量 |
| 变换矩阵 | 旋量坐标ξij | qij |
| T1, 2 | (0, 1, 0, 0, 0, 0)T | θi1 |
| T1, 4 | (0, 1, 0, 0, 0, 0)T | θi2 |
| T1, 6 | (0, 0, 1, 0, 0, 0)T | θi3 |
| T1, 8 | (0, 0, 1, 0, 0, 0)T | θi4 |
| T1, 10 | (0, 1, 0, 0, 0, 0)T | θi5 |
按坐标系顺序将各变换矩阵相乘,基于局部POE方法建立Delta机器人运动学模型为
其中$\boldsymbol{T}_{i, j}=\mathrm{e}^{\xi_{i i} q_{i j}} \in \mathrm{SE} \text { (3) }$ , (i=1, 2, 3;j=1, 2, …,11),i表示Delta机器人的第i条支链。
根据几何关系和式(13)可得
代入式(16)可简化计算。
3 误差模型的建立
其中$\boldsymbol{\xi}=\left[\boldsymbol{\omega}^{\mathrm{T}}, \boldsymbol{v}^{\mathrm{T}}\right]^{\mathrm{T}} \text {, 令 } \theta=\left(\omega_x^2+\omega_y^2+\omega_z^2\right)^{\frac{1}{2}}$ ,则
其中ad(ξ)为Lie代数的伴随表示,定义为
机器人的误差模型可以通过对运动模型式(16)两边微分并乘T的逆获得,即,
其中$\delta \boldsymbol{T} \boldsymbol{T}^{-1} \in \mathrm{se}(3)$ 表示机器人末端实际位姿到理想位姿的偏差,由旋量理论可知,δ TT -1经过“∨”运算,可被映射为一个六维的旋量坐标ξ =[ω T, v T]T,根据实际意义,该旋量坐标对应为机器人末端位姿误差,对式(21)进行“∨”运算,可得
其中,假设M ∈SE(3),Ad(M)为其伴随变换,定义为
根据式(18)进一步简化式(22),可得
其中
4 各误差项影响规律分析
4.1 仅考虑加工导致的结构误差项
加工导致的误差主要体现在各部件的尺寸误差上,主要的部件尺寸为R、r、La、Lb、a1和a2。只考虑以上结构尺寸误差对末端位置的影响时,对应式(24)中其下标为奇数的部分,且只和变量有关,不涉及结构旋量,因此,式(24)可变换为
其中
假设各结构误差对末端定位精度的影响相互独立。设结构误差均为0.100 mm。为分析结构误差对机器人X、Y、Z三个方向的运动分别造成的影响,机器人运动空间定为X∈[—600 mm, 600 mm];Y∈[—600 mm, 600 mm];Z∈[650 mm, 1 000 mm],分析结果如图 6所示。以下分析将用综合误差表示对机器人末端误差造成的影响,其定义为
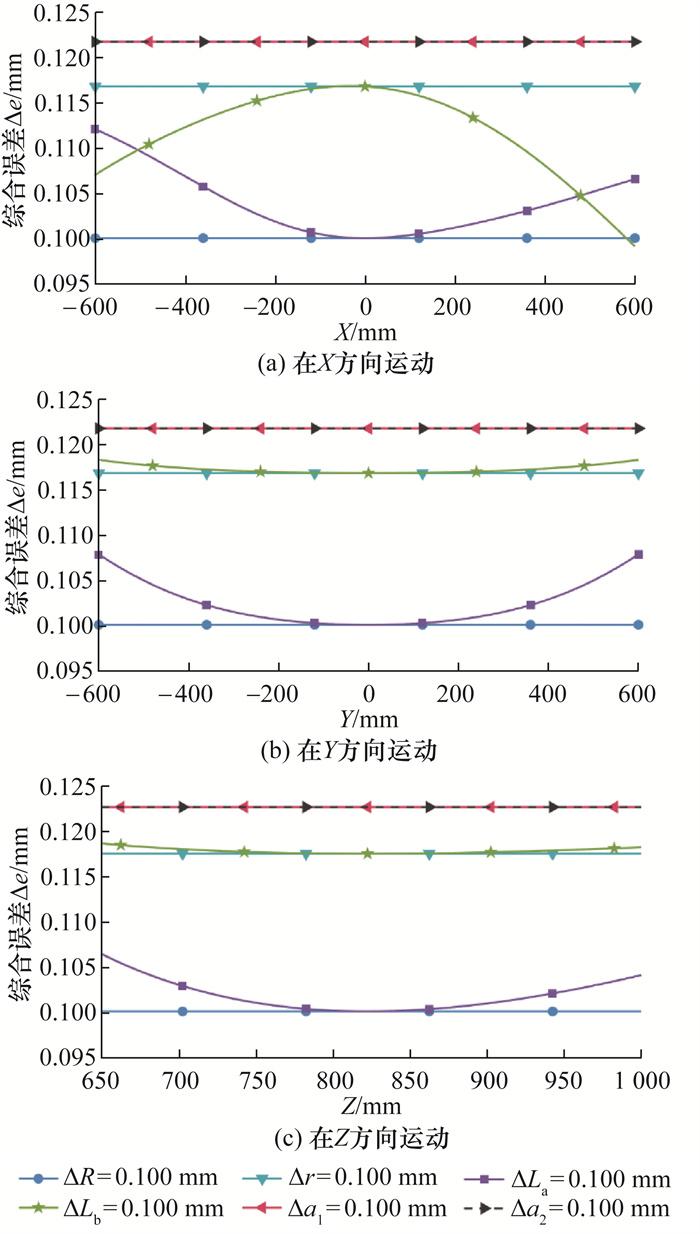
由图 6可知,机器人末端在X方向上移动时,R的长度误差对末端定位精度的影响最小,La为定值0.100 mm;La的误差对末端定位精度的影响最大,距离零点越远,末端综合误差越大,最小误差值为0.100 mm,最大误差值为0.112 mm;距离零点越远,由Lb的误差引起的末端综合误差越小,最大误差值为0.117 mm,最小误差值为0.100 mm,其余结构误差引起的末端综合误差均为定值。机器人末端分别在Y方向和Z方向上移动时,所有结构误差引起的综合误差近似定值;机器人末端在Z方向上移动时,La的误差对末端定位精度的影响最大,距离零点越远,末端综合误差越大,其余结构误差引起的综合误差近似定值。
综合分析可知,主动臂长度La和从动臂长度Lb的加工误差对机器人末端定位精度影响更显著。
4.2 仅考虑驱动角度误差项
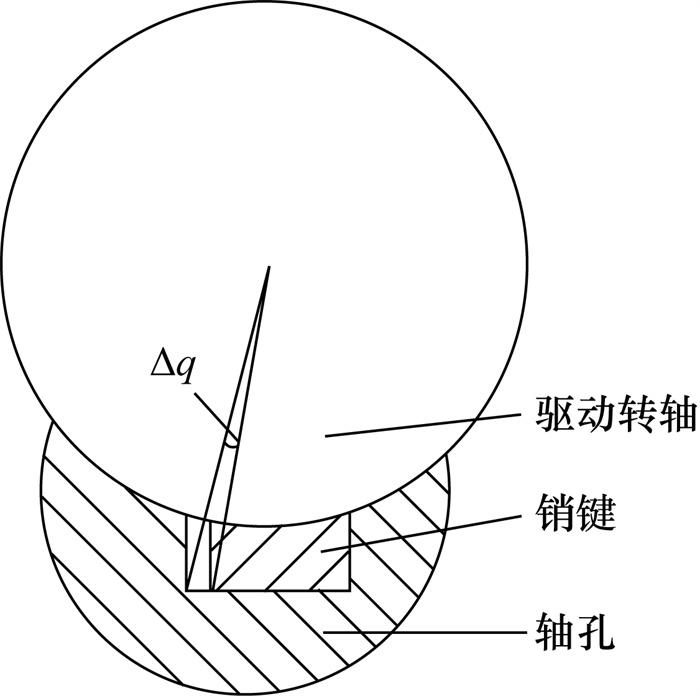
机器人的主动臂通过销键和电机转轴相连,如图 7所示,阴影部分表示电机转轴上的销键。理想情况下,销键和与之配合的孔能够紧密配合,但实际加工过程中受加工精度影响,两者之间存在一定的间隙,图中的Δq表示由此间隙引起的转动角度误差。
由于只考虑驱动角的影响,式(24)可简化为
观察式(27)可知,当驱动角轴线位置处于理想状况下,仅存在驱动角度误差,即δ ξi2=0时,机器人末端位置误差与驱动角度误差成正比关系,即相同运动轨迹,驱动角度误差越大引起的末端综合误差越大。为分析3条支链的驱动角度误差分别对末端定位精度的影响,假设驱动角度误差均为0.100°,机器人运动空间定为X∈[—600 mm, 600 mm];Y∈[—600 mm, 600 mm];Z∈[650 mm, 1 000 mm],结果如图 8所示。
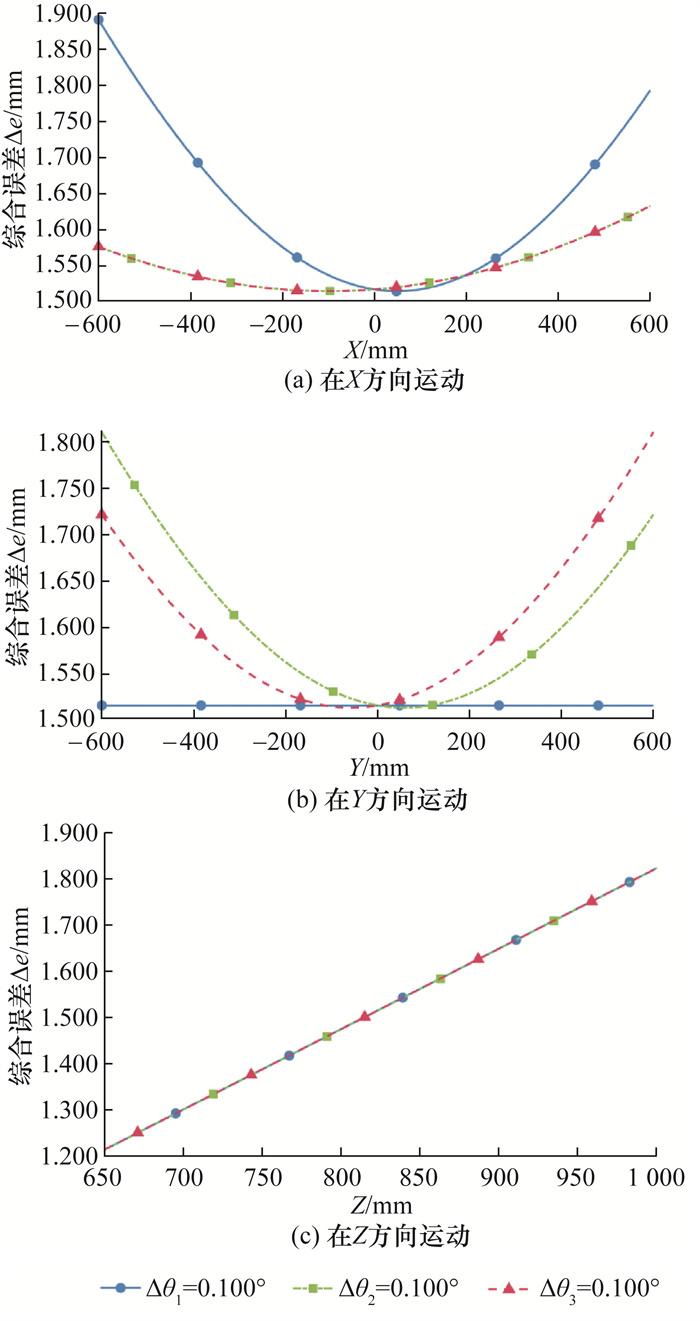
由图 8可知,机器人末端在X方向上移动时,3条支链的驱动角度误差引起的末端综合误差均随着X的增大先减小后增大,其中支链2和3的情况相同,最大误差值为1.631 mm,最小误差值为1.513 mm,整体变化不明显,而支链1的驱动角度误差对末端定位精度的影响较为明显,最大误差值为1.891 mm,最小误差值为1.513 mm;机器人末端在Y方向上移动时,支链1的驱动角度误差引起的末端综合误差为定值1.515 mm,支链2和支链3引起的末端综合误差关于零点对称,极差均为0.297 mm,近似为定值;机器人末端在Z方向上移动时,3条支链的驱动角度误差引起的末端综合误差一致,均和Z坐标成正比关系,在工作空间内,最大误差值为1.864 mm,最小误差值为1.167 mm。
因此,3条支链的驱动角度误差对末端位置精度在各运动方向上均造成了一定程度的影响,且引起的综合误差明显大于结构误差引起的综合误差,因此驱动角度误差在末端综合误差的产生过程中占据主导地位。
4.3 仅考虑球面副间隙误差项
Delta机器人中主动臂和从动臂、从动臂和动平台之间均为球面副连接,但球面副必然存在装配间隙、加工制造中的球径误差以及在长期使用下球面副接触表面出现磨损导致的间隙误差,因此分析球面副间隙对Delta机器人末端执行器定位精度的影响至关重要。
球面副误差模型如图 9所示,p、q分别为球面副球套和球头的中心,间隙的存在导致p、q不重合,假设两点距离为D。在p点建立坐标系p-xyz,α为pq连线与z轴的夹角;γ为pq连线在pxy平面投影与y轴的夹角。q点相对于p点的坐标可表示为
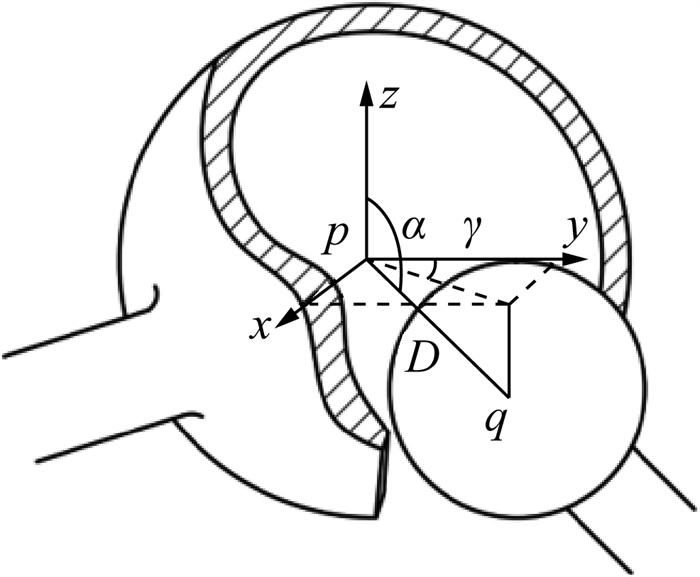
理想的球面副只存在3个转动自由度,约束了3个方向的平动自由度。因此,相对于理想状态,球面副间隙引入的误差只有3个平动误差,在误差模型中的表示为球面副连杆的旋量坐标误差,即δ ξi5和δ ξi9,因此只考虑球面副间隙,即除δ ξi5和δ ξi9外,其余旋量增量皆为 0,式(24)可简化为
其中
为方便分析,设3个方向的误差均为0.100 mm,则旋量坐标误差δ ξi5和δ ξi9均为Δ=[0, 0, 0, 0.100, 0.1, 0.100]/a。分析3条支链的球面副间隙分别对末端定位精度的影响,机器人运动空间定为X∈[—600 mm, 600 mm];Y∈[—600 mm, 600 mm];Z∈[650 mm, 1 000 mm],分析结果如图 10所示。由图可知,机器人末端在X方向上移动时,支链1的球面副间隙引起的末端综合误差为定值,支链2和支链3的球面副间隙对末端定位精度的影响相同,距离原点越近,产生的综合误差越大,最大误差值和支链1的球面副间隙引起的综合误差相同,为0.346 mm,最小误差值为0.337 mm,整体变化不明显;机器人末端在Y方向上移动时,3条支链均呈现随着与原点距离的增大而增大的趋势,其中支链1的球面副间隙引起的末端综合误差起伏明显,最小误差值为0.333 mm,最大误差值为0.346 mm,支链2和支链3的球面副间隙对末端定位精度的影响相同,最大和最小误差的差值仅为0.003 mm,近似相等;机器人末端在Z方向上移动时,3条支链的驱动角度误差引起的末端综合误差一致,均保持为0.346 mm。
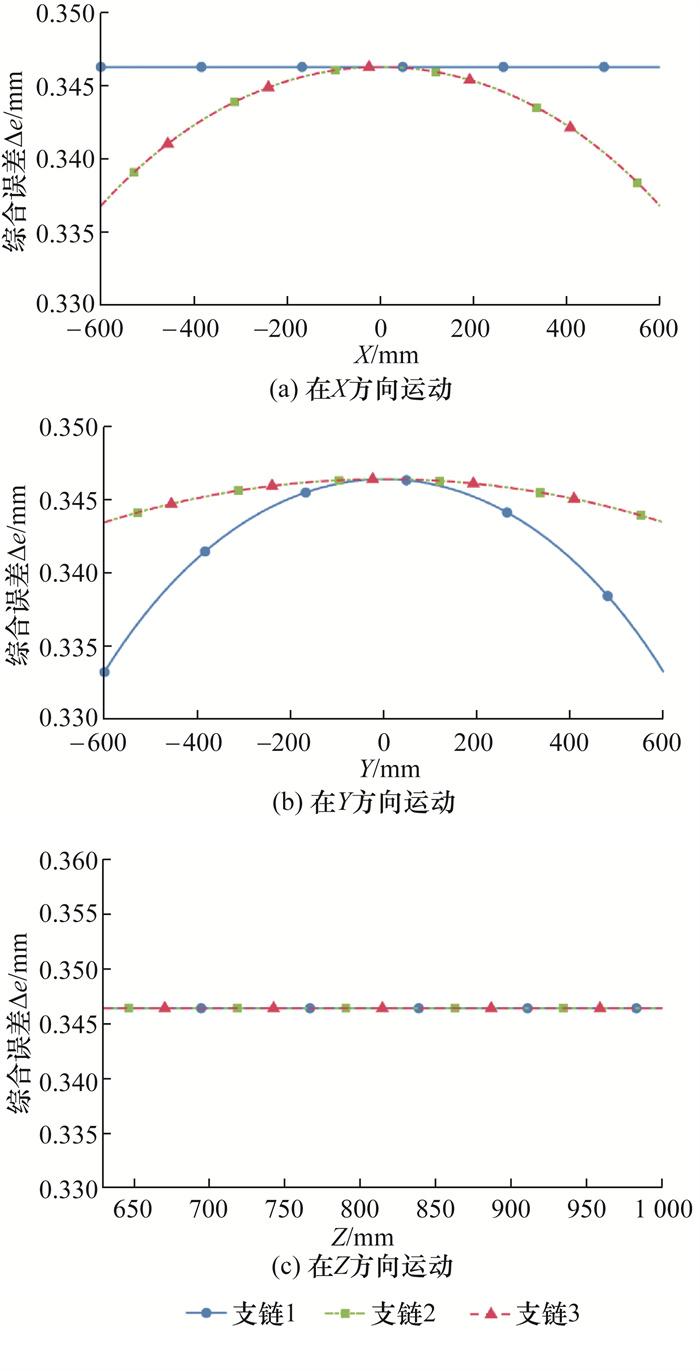
因此,3条支链的球面副间隙引起的末端综合误差不同,但整体变化幅度不大。综合考虑,球面副间隙对机器人末端定位精度造成的影响介于结构误差和驱动角度误差之间,不可忽视。
4.4 多项误差源综合影响分析
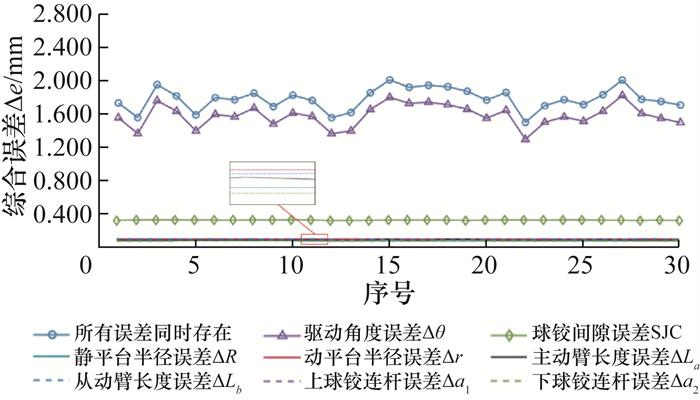
为验证上文分析结论的正确性,考虑所有误差源同时存在,包括静平台半径误差ΔR、动平台半径误差Δr、主动臂长度误差ΔLa、从动臂长度误差ΔLb、上球铰连杆误差Δa1、下球铰连杆误差Δa2、驱动角度误差Δθ和球铰间隙误差SJC。并假设误差源大小均为0.100个单位,其中长度单位为mm,角度单位为(°)。在工作空间内随机取30个点,分别计算末端综合误差。在相同点位,依次使单一误差源起作用,分别求得对应的末端位置综合误差。结果如图 11所示。由图可知,当驱动角度误差单独存在时,末端综合误差值在1.500~2.000 mm波动;当球面副间隙单独存在时,末端综合误差在0.340 mm附近小幅变化;其余结构误差引起的末端综合误差均近似为0.090~0.120 mm。该结果与上文所得结论一致:驱动角度误差对末端定位精度的影响最大,球面副间隙次之。当所有误差源同时存在时,变化趋势与仅存在驱动角度误差时保持一致。由于机器人整体为对称结构,误差源同样为对称分布,故当所有误差源同时存在时,X、Y方向的误差可能会抵消,Z方向的误差会叠加,因此所有误差源对定位精度的影响并不是线性叠加关系。
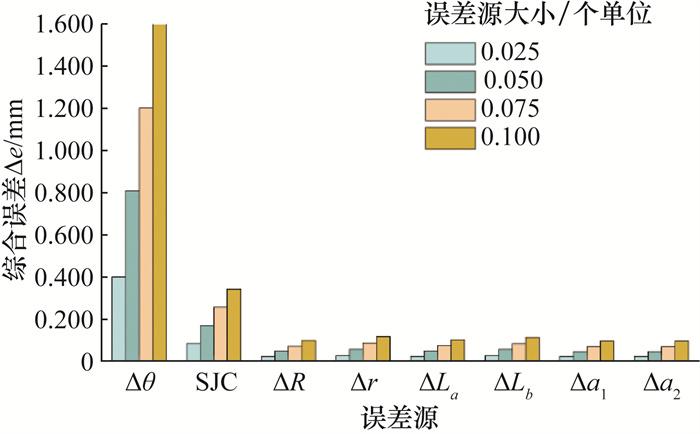
为了分析误差源大小对末端定位精度的影响,在机器人工作空间随机取50个点,分别取误差源为0.025、0.050、0.075和0.100个单位,取50个点的综合误差平均值,结果如图 12所示。由图可知,当误差源大小成倍增加时,相应产生的综合误差也成倍增加,两者为正比关系,同时随着误差源数值的增大,各项误差源对定位精度的影响程度相对不变,即驱动角度误差对机器人定位精度的影响仍旧处于突出地位。
5 结论
为解决Delta机器人现有误差建模方法存在奇异性及完整性不足等问题,本文基于局部POE方法建立了Delta机器人的误差模型,并基于所建立的模型分析了各项误差源对机器人定位精度的影响,得出如下结论:
1) 基于旋量理论,采用局部POE方法建立了Delta机器人的运动学模型,并基于指数积微分映射和伴随变换映射,构建了Delta机器人的运动学误差模型,相较于传统D-H法及空间矢量法,本文所提方法避免了运动学表达的奇异性,物理意义更加明确且模型更加完整,同时本文所提方法对其他并联机构误差分析具有参考意义。
2) 分析了结构误差、驱动角度误差及球面副间隙对Delta机器人末端定位精度的影响规律。其中,驱动角度误差对机器人末端定位精度的影响最大,球面副间隙次之,在结构误差中,主、从动臂的长度误差引起的影响更为突出。
3) 由结论可得,在设计机器人误差补偿控制算法时,应着重增强对驱动角度偏差、球面副间隙及主动与从动臂杆长度误差的修正强度,以提高机器人控制精度和算法效率。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}