

近年来,能源危机逐渐加剧,环境污染问题日益严重,开发和利用海上可再生能源的需求持续增长。风能因其巨大的储量和极佳的可持续性,被视为极具发展前景的可再生能源之一[1]。随着海上风能开发逐步向深远海推进,传统的固定式风机技术面临着水深和地质条件的限制。相比之下,浮式风机技术凭借对深水环境的适应性及对海床条件的低依赖性,在深远海风资源开发中展现出显著优势。与浮式水平轴风机(horizontal-axis wind turbine, HAWT)相比,浮式垂直轴风机(vertical-axis wind turbine, VAWT)具有低重心和无须偏航装置等优势[2],愈发吸引研究者们的关注。目前,研究人员已经提出多个浮式VAWT概念[3],如Deepwind[4]和Aerogenerator X[5]。
波浪水池模型试验是验证新型浮式风机概念设计可行性的可靠方法之一,其可模拟浮式风机在各种环境条件下的动态行为,以验证这些新概念风机的运行可行性并校准浮式风机系统的数值模型。相较于浮式HAWT,浮式VAWT在水池模型试验方面的研究较少。Liu等[6]在天津大学开展了5 MW浮式VAWT的水池模型试验,采用的缩尺比为1∶70,该风机由ϕ型转子和Spar平台组成。Rajeswari等[7]对支撑在三立柱和四立柱半潜平台上的三叶片H型转子的浮式VWAT开展了缩尺比为1∶75的水池模型试验。结果表明,四柱式半潜平台在垂荡、横摇和纵摇运动中的响应低于三柱式半潜平台。Ikoma等[8]在波浪水池中对一种支撑在4个矩形月池上的驳船型浮式VAWT进行了缩尺比为1∶100的模型试验,旨在研究该风机的陀螺效应。同样,Zheng等[9]和Deng等[10]也通过水池模型试验研究了不同浮式VAWT概念的动力响应特性。然而,上述研究通常采用Froude缩尺转子来分析各类风机概念的动力响应,这导致了对关键动力响应的低估。此外,这些研究大多集中于平台运动及其水动力性能、塔底弯矩、锚链张力等方面的分析,而对浮式VAWT的叶片与横撑的相关研究相对较少。
1 原型风机和环境条件
1.1 原型风机
本研究提出的浮式VAWT概念被命名为5 MW SJTU-VAWT-SPICII(semisubmersible platform with partially inclined columns second edition, SPICII),由三叶片H型转子和半潜平台组成。本节将介绍其所采用的转子概念、半潜平台、锚链系统等信息。
表 1 5 MW三叶片转子的主要参数 |
| 参数 | 数值 |
| 切入、额定、切出风速/(m·s-1) | 5、14、25 |
| 额定转速/rpm | 10.28 |
| 翼型截面代号 | NACA0018 |
| 叶片弦长/m | 2.70 |
| 叶片长度/m | 80.00 |
| 塔顶高度/m | 99.78 |
| 塔架直径/m | 2.00 |
| 转子半径/m | 39.00 |
| 轮毂高度/m | 79.78 |

1.2 环境条件
表 2 实尺度下的环境条件 |
| 工况 | Hs/m | Tp/s | γ | 平均风速/(m·s-1) |
| EC1 | 3.5 | 10 | 2 | — |
| EC2 | — | — | — | 11.4 |
| EC3 | — | — | — | 14.0 |
| EC4 | 3.5 | 10 | 2 | 11.4 |
| EC5 | 3.5 | 10 | 2 | 14.0 |
注: Hs为有义波高,Tp为谱峰周期,γ为谱峰因子。 |
2 试验模型和测量仪器
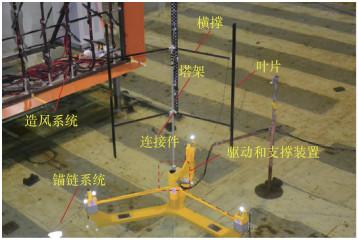
以5MW SJTU-VAWT-SPICII原型风机为研究对象,在上海交通大学海洋工程水池开展1∶50的缩尺模型试验,如图 2所示,原型水深为42 m,对应的试验水深为0.84 m。本节将介绍试验模型、试验设施和用于测量重要动力响应的试验仪器等。
2.1 试验模型
在开展波浪水池模型试验之前,需基于合适的缩尺准则对5MW SJTU-VAWT-SPICII原型风机进行缩尺设计。本节将详细介绍各部分的缩尺模型,包括转子模型、驱动和支撑装置、平台和锚链模型等。
2.1.1 转子模型
浮式VAWT通常遭受气动载荷和水动力载荷,需要满足不同的缩尺准则。具体而言,下端的浮体和锚链需要满足Froude相似,上端的叶轮转子需要满足Reynolds相似。然而,Reynolds相似和Froude相似不能同时满足。为此,本研究提出了一种适用于漂浮式VAWT水池模型试验的性能缩尺转子设计方法,并将该方法应用于5MW SJTU-VAWT-SPICII原型风机的转子模型设计中。
该方法基于Cheng等[16]提出的致动柱理论,以Froude缩尺转子为基础,主要包含以下3个步骤:1) 选择一种在低Reynolds数下具有良好气动性能的新翼型代替原始翼型;2) 基于致动柱模型推导出推力系数CT与弦长c之间的函数关系式,并采用最小二乘拟合进行修正以提高精度;3) 通过函数关系式确定c。
本研究选择AG455ct02r翼型作为性能缩尺转子的设计翼型,针对5MW SJTU-VAWT-SPICII原型风机,得出的CT与c的关系式如下:
其中:额定风速下的目标CT为0.71,Froude缩尺转子的弦长c0为54.0 mm。因此,在叶片长度保持几何相似的条件下,模型叶片的c增加了1.42倍,为76.7 mm。其余设计细节可见本团队前期工作[17]。
转子模型主要由叶片、横撑和塔架组成。由于叶片质量需满足Froude相似,故采用轻质碳纤维材料结合气袋成型工艺制造,最终的叶片厚度为0.4 mm。此外,每个叶片在距其底端1/4和3/4长度处各连接1个横撑,这些横撑进一步与塔架相连。基于几何相似,模型转子的半径应为0.78 m。横撑采用圆管设计,同样选用密度低、刚性高的碳纤维材料,以最大限度减少其对转子气动性能的影响。最终加工的横撑模型外径为22.0 mm,壁厚为0.5 mm。塔架主要用于连接上端转子和下端浮体。塔架模型由等截面铝合金圆管制成,外径为30 mm,壁厚为3.5 mm,质量为1 236.0 g。此外,为了连接塔架与横撑,专门设计了2个四通连接件,其质量分别为84.5 g和84.6 g。设计完成的叶片、横撑和塔架模型的主要参数如表 3所示。
表 3 叶片、横撑和塔架的参数 |
| 参数/单位 | 实尺度 | 模型尺度 |
| 转子半径/m | 39.00 | 0.78 |
| 横撑外径/mm | 1 080.00 | 22.00 |
| 横撑厚度/mm | 27.00 | 0.50 |
| 塔顶高度/m | 99.78 | 1.99 |
| 塔架外径/m | 2.00 | 0.03 |
| 塔架厚度/mm | 27.00 | 3.50 |
| 叶片弦长/mm | 2 700.00 | 76.70 |
| 转子质量/kg | 315 300.00 | 2.262 |
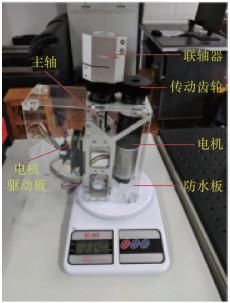
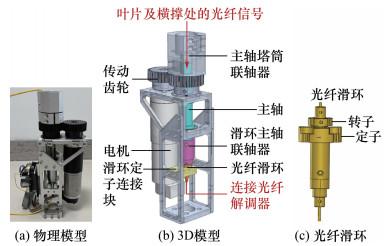
2.1.2 驱动和支撑装置
驱动及支撑装置,包括电机、传动齿轮、联轴器、防水板等部件,如图 3所示。在水池模型试验中,该装置的主要目的是驱动叶片旋转,以获得不同风速下的目标推力。这与原型风机的工作原理相反,后者通过风力驱动叶片旋转来发电。
2.1.3 半潜平台和锚链模型
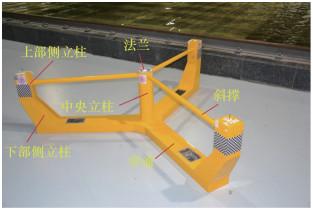
表 5 浮式风机系统的整体特性 |
| 参数/单位 | 实尺度 | 模型尺度 |
| 吃水/m | 18.00 | 0.36 |
| 排水量/kg | 8 354 800 | 65.208 |
| 质量/kg | 8 227 100 | 64.212 |
| 重心距水线面下方距离/m | 5.170 | 0.103 |
| 绕X轴惯性半径RX/m | 38.890 | 0.778 |
| 绕Y轴惯性半径RY/m | 39.290 | 0.786 |
| 绕Z轴惯性半径RZ/m | 40.060 | 0.801 |
表 6 系泊系统的主要特性 |
| 参数/单位 | 实尺度 | 模型尺度 |
| 长度/m | 343 | 6.86 |
| 外径/m | 0.076 | — |
| 湿重/(kg·m-1) | 126 | 0.049 |
| 轴向刚度/(kN·m-1) | 583 000 | 227.512 |
| 预张力/N | 211 700 | 1.652 |
此外,在导缆孔位置安装了弹簧,以模拟系泊缆的刚度,导缆孔坐标如表 7所示(以水线面中心为原点)。
表 7 实尺度下导缆孔的坐标 |
| 锚链编号 | X/m | Y/m | Z/m |
| L1 | 26.851 | 49.507 | 8 |
| L2 | 29.449 | 48.007 | 8 |
| L3 | 29.449 | -48.007 | 8 |
| L4 | 26.851 | -49.507 | 8 |
| L5 | -56.3 | -1.5 | 8 |
| L6 | -56.3 | 1.5 | 8 |
2.2 测量仪器
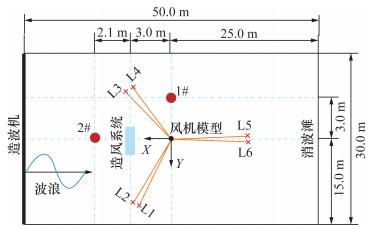
用于模型试验的波浪水池俯视图如图 5所示,标示了造风系统、造波机、消波滩、浪高仪及风机模型的具体位置。在模型试验中,为了捕捉浮式风机系统关键的运动和结构响应,在试验水池和半潜平台模型上布置了一系列传感器。此外,为了捕捉叶片和横撑上的应变响应,开发了一套光纤光栅-光纤滑环应变监测系统。
2.2.1 运动和载荷响应
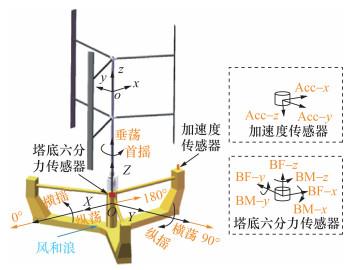
在驱动和支撑装置底部与浮体铝制法兰之间安装一个六分力传感器,该传感器嵌入浮体的中央立柱内部,用于测量驱动和支撑装置底部的力和力矩。此外,在浮体上装备了非接触光学测量系统,用于精确捕捉风机系统的六自由度运动。同时,在6条系泊缆的导缆孔位置安装了单分力传感器,用于测量系泊缆的张力。热线风速仪和浪高仪被用于测量风速和波浪高度。此外,一个加速度传感器安装于浮体的侧立柱上,用于测量平台在X、Y、Z方向上的运动加速度。全局坐标系O-XYZ及各传感器的局部坐标系o-xyz设置如图 6所示,全局坐标系的原点设定在浮体的水线面中心,X轴正方向指向上风侧,Z轴正方向垂直向上。局部坐标系的原点设定在轮毂中心,x轴正方向与X轴相同,z轴正向竖直向上。
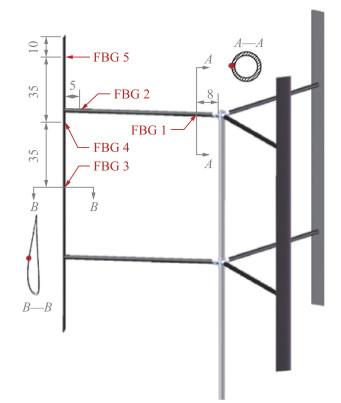
2.2.2 叶片和横撑应变监测
针对具有直叶片的浮式VAWT,叶片和横撑是关键部件,其应变监测至关重要。为此,本研究开发了基于光纤Bragg光栅(fiber Bragg grating,FBG)传感器和光纤滑环(fiber optical rotary joint,FORJ)的应变监测系统。
3 标定试验
为了确保实验结果的精确性与可靠性,对风场与波浪场进行了校核。此外,在进行风浪联合实验之前,进行了一系列标定实验,包括推力标定、六自由度静水衰减试验、旋转测试等。
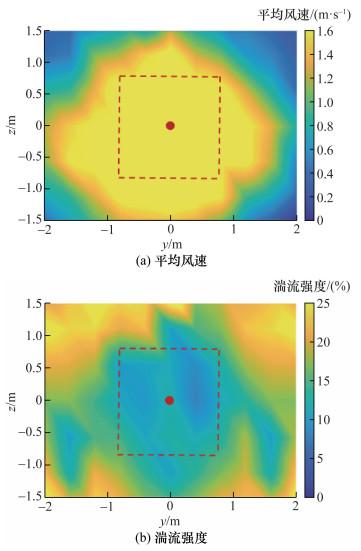
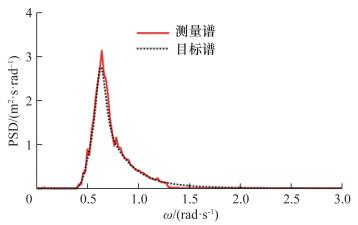
3.1 风场和波浪场标定
3.2 推力标定
基于2.1.1节的性能缩尺转子模型,在岸上进行了推力标定试验。在风速为11.4 m/s和14.0 m/s条件下,推力和转速测量值与目标值的对比如表 8所示。针对额定风速,试验推力与目标推力的误差为8.15%。鉴于该性能缩尺转子是专为额定风速设计,当风速为11.4 m/s时,试验中将转速从10.28 rpm微调至9.52 rpm来匹配该风速下的目标推力。
表 8 推力和转速测量值与目标值的对比 |
| 风速/(m·s-1) | 指标/单位 | 测量值 | 目标值 | 相对误差/% |
| 11.4 | 平均推力/kN | 410.00 | 407.50 | 0.60 |
| 14.0 | 平均推力/kN | 582.50 | 535.00 | 8.15 |
| 11.4 | 转速/rpm | 9.52 | 10.28 | 7.39 |
| 14.0 | 转速/rpm | 10.28 | 10.28 | 0.00 |
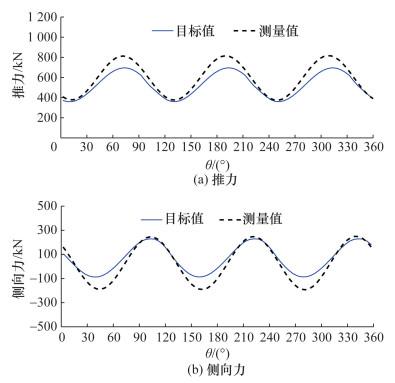
此外,由于VAWT旋转过程中推力和侧向力会出现周期大幅波动,14.0 m/s下推力和侧向力的目标值与测量值随方位角变化的对比如图 11所示。
3.3 六自由度静水衰减试验
六自由度静水衰减试验用于评估平台的固有周期和无量纲阻尼系数。实尺度下5MW SJTU-VAWT-SPICII原型风机的固有周期和无量纲阻尼系数如表 9所示。
表 9 实尺度下浮式风机系统的固有周期和无量纲阻尼系数 |
| 试验项目 | 固有周期/s | 无量纲阻尼系数 |
| 纵荡 | 115.18 | 0.182 |
| 横荡 | 96.26 | 0.268 |
| 垂荡 | 24.50 | 0.104 |
| 横摇 | 25.90 | 0.050 |
| 纵摇 | 26.10 | 0.050 |
| 首摇 | 125.30 | 0.162 |
3.4 旋转测试
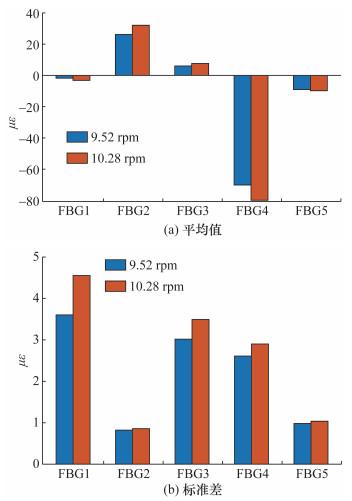
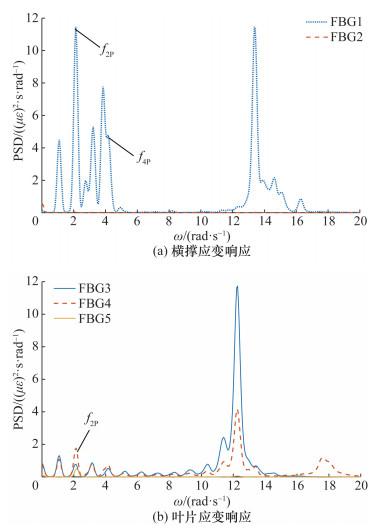
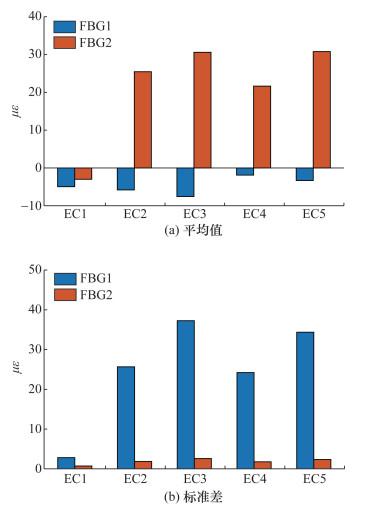
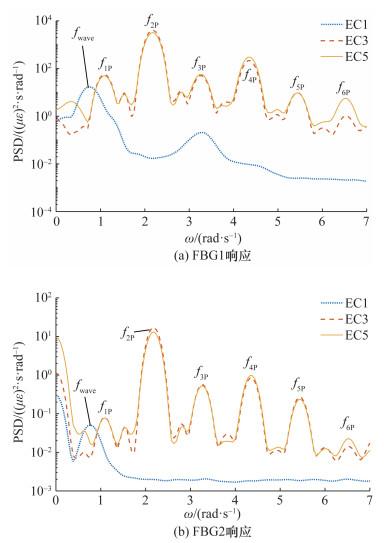
为评估叶片和横撑应变响应对外部激励的敏感性,在静水中进行了旋转测试。该测试仅涉及电机的旋转,无须额外的外部激励。机械应变用微应变(με,μ=1×10-6)来描述,这也适用于后续的结果分析。当转速从9.52 rpm增加至10.28 rpm时,由于离心效应的增强,应变的平均值(mean value)和标准差(standard deviation,STD)均呈现上升趋势,如图 12所示。以10.28 rpm为例,叶片和横撑应变响应的PSD如图 13所示。可以发现,位于横撑上的FBG1应变响应在f2P(两倍转子频率)和13.42 rad/s处存在明显峰值。其中,13.42 rad/s对应于叶片和横撑之间的耦合振动模态,这是由叶片与横撑之间的动态相互作用引起的。叶片应变响应在f2P和12.22 rad/s处同样呈现出显著峰值。其中,12.22 rad/s对应叶片的首阶挥舞弯曲模态,该模态由叶片所受离心力激励产生。因此,光纤光栅-光纤滑环系统能够有效捕捉叶片和横撑应变信号。基于该系统,后续将深入研究风或浪条件下叶片和横撑的应变响应特性。
4 分析和讨论
标定试验完成后,本节将探讨浮式VAWT系统在仅风、仅不规则波、风浪联合条件下的动力响应特性,包括平台运动响应、塔底弯矩响应以及锚链张力响应。此外,还将对叶片和横撑的应变响应特性进行深入分析,以全面评估风机叶片和横撑在不同运行条件下的性能表现。需要注意的是,本节在模型尺度下进行实验,并将实验结果转化为实尺度下进行数据展示。
4.1 平台运动响应特性
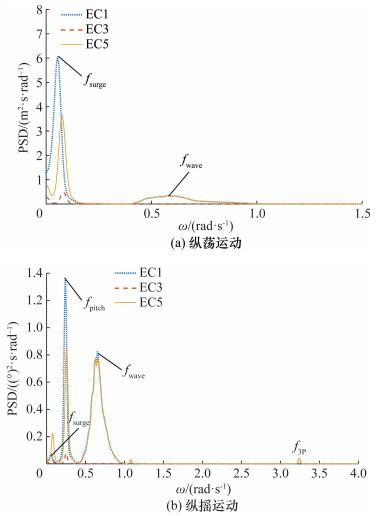
EC1-EC5工况下纵荡和纵摇运动的平均值和标准差如表 10所示。可以看出,EC1工况下,纵荡和纵摇运动的均值较小。随着风载荷的引入,EC4和EC5工况下纵荡和纵摇运动的平均值相对于仅波浪工况显著增加,且EC5工况下这2种运动的平均值均高于EC4工况。这是由于EC5工况对应更大的气动载荷。此外,与仅波浪和风浪联合条件相比,仅风条件下,这2种运动的标准差均较小。
表 10 EC1-EC5工况下纵荡和纵摇运动的平均值和标准差 |
| 工况 | 指标/单位 | 平均值 | 标准差 |
| EC1 | 纵荡/m | -0.42 | 0.63 |
| 纵摇/(°) | 0.04 | 0.47 | |
| EC2 | 纵荡/m | -6.43 | 0.17 |
| 纵摇/(°) | -1.17 | 0.07 | |
| EC3 | 纵荡/m | -8.56 | 0.15 |
| 纵摇/(°) | -1.75 | 0.09 | |
| EC4 | 纵荡/m | -7.09 | 0.57 |
| 纵摇/(°) | -1.00 | 0.45 | |
| EC5 | 纵荡/m | -9.10 | 0.52 |
| 纵摇/(°) | -1.69 | 0.45 |
4.2 塔底弯矩响应特性
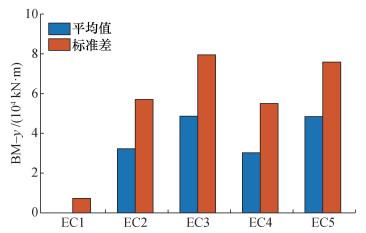
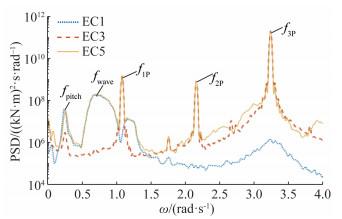
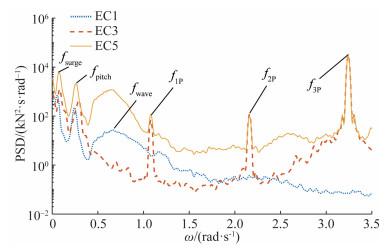
塔底承受着巨大的波浪载荷和风载荷,因此被认为是相对脆弱的结构部件。考虑到风和波浪的作用方向,塔底弯矩BM-y(见图 6)是最重要的载荷分量,因此将其作为分析的重点。EC1-EC5工况下塔底弯矩BM-y的平均值和标准差如图 15所示。EC1工况下,BM-y的均值和标准差均较小。这是由于波浪引起的纵摇运动均值仅为0.04 °,因此上部转子重力对塔底产生的弯矩几乎可以忽略不计。在仅风工况(EC2和EC3)以及风浪联合工况(EC4和EC5)下,BM-y的平均值和标准差均显著提升,并且随着风速的增加,呈现出上升的趋势。图 16展示了BM-y的谱分析结果。可以观察到,在仅波浪工况下,塔底弯矩BM-y主要受波频响应的影响。而在仅风及风浪联合工况下,BM-y则主要由f3P (3倍转子频率)成分占主导。
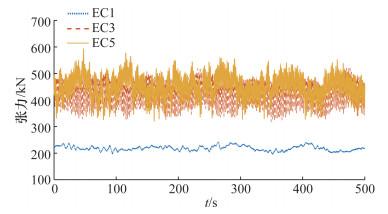
4.3 锚链张力响应特性
4.4 叶片和横撑应变响应特性
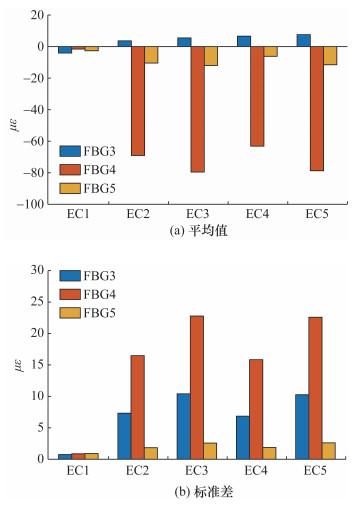
当工况从EC1变化至EC4,再至EC5时,叶片上FBG3、FBG4和FBG5的统计结果均呈现上升趋势。这是因为在风速低于额定风速的情况下,气动载荷随着风速的提升而增强,进而导致叶片应变的增加。除了EC1工况外,FBG4的平均值和标准差均显著高于FBG3和FBG5。此外,在风载荷作用下,考虑到当前叶片与横撑的连接方式(即每个叶片在距其底端1/4和3/4长度处分别连接1根横撑),叶片可假设为受均匀分布载荷作用的简支梁。在这种情况下,叶片与横撑连接处承受最大弯矩,导致该位置(FBG4)的应变达到最高值。
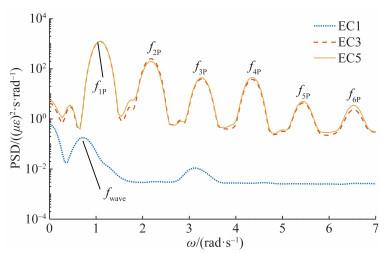
FBG4响应的功率谱如图 22所示。结果表明,EC3和EC5工况下FBG4的功率谱在f1P频率处呈现最高峰值。这是因为在当前传感器的布置中,FBG4主要用于监测由叶片法向力引起的应变响应,而单个叶片的法向力主要由f1P成分占主导。
5 结论
本文以5 MW SJTU-VAWT-SPICII概念风机为对象,基于所开发的性能缩尺转子和光纤光栅-光纤滑环应变监测系统,通过水池模型试验对其动力响应特性进行了全面分析与研究。主要结论如下:
1) 平台纵荡和纵摇运动的均值主要受风载荷的影响,而其波动则主要受波浪载荷影响。此外,纵荡和纵摇运动中均存在气动阻尼效应。
2) 针对塔底弯矩和锚链张力,其均值和波动均受气动载荷的影响,且f3P(3倍转子频率)成分占主导。
3) 针对叶片和横撑应变响应,波浪载荷的影响微弱,其主要受风载荷的影响。基于当前的传感器布置,叶片应变响应主要由f1P成分主导,而横撑应变响应则主要由f2P成分主导。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}