

为缓解车轮和车身各个方向的振动,一些学者在电动轮中引入了内悬置的概念。这类电动轮构型中,驱动电机或动力装置不再与底盘刚性连接,而是通过弹簧、阻尼元件与底盘相连。然而,电机悬置的引入,使已配置电驱动系统和制动系统的轮内空间更加拥挤。不合理的子系统布置可能导致转向节结构复杂、轮内空间利用率低或者散热困难。
上述研究提出了多种不同的构型,为电动轮设计提供了有益参考。然而,现有文献普遍聚焦于特定构型的参数优化和性能分析,对于构型选择的内在逻辑及可能存在的更优方案尚未深入探讨。
系统化设计方法(systematic design)起源于20世纪中后期,最早由德国工程师协会(VDI)在其发布的2221号指南中构建了系统化设计的方法论框架。该指南提出了通过逻辑分解降低设计复杂性的基本原则[17],为工程设计流程的规范化提供了初步探索,旨在以结构化策略取代传统的试错模式。1984年,Pahl和Beitz提出了具有里程碑意义的系统化设计模型。该模型以功能结构分解为核心,创新性地引入形态矩阵法,实现子功能解的系统组合,为复杂产品的模块化设计提供了可操作的流程[18]。此后,系统化设计方法持续发展,逐渐形成包含需求分析、概念生成和方案评估的完整设计体系。其结构化特征不仅增强了设计决策的可追溯性[19],更通过系统化的解空间探索机制,有效提升了创新方案的生成效率与工程可行性。
因此,本文采用系统化设计方法,在统一理论框架下对内悬置电动轮的构型进行梳理和评估,并探索新的构型方案。基本研究思路如图 1所示。
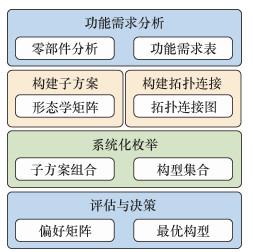
首先,开展功能需求分析,厘清内悬置电动轮各零部件的功能,并制定功能需求表。其次,利用形态学矩阵构建各功能的零部件方案,绘制拓扑连接图以确定可能构型中零部件的拓扑关系。然后,基于零部件方案和连接方式进行系统化枚举,形成构型方案集。最后,建立偏好矩阵并对各可能构型进行评估与分析,以挑选出最优解决方案。
1 内悬置电动轮的功能需求分析
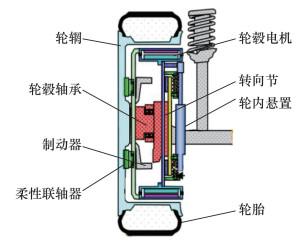
表 1 内悬置电动轮零部件功能需求分析 |
| 零部件 | 功能 |
| 转向节 | 支撑轮毂轴承、电机定子和制动钳等非旋转部件 |
| 轮毂轴承 | 承载车身负荷,保障旋转部分和非旋转部分之间的相对运动 |
| 轮辋 | 维持轮胎的形状并与轮毂连接 |
| 轮胎 | 增大车轮与路面的附着,并缓冲路面冲击 |
| 制动器 | 实现车辆减速与驻车,将车辆的动能转换为热能耗散 |
| 轮毂电机 | 将电能转化为机械能,通过直接驱动或经减速器增扭后提供车辆行驶动力。 |
| 轮内悬置 | 通过弹性结构和阻尼特性吸收和衰减来自路面的冲击能量,减少驱动单元受到的振动和冲击 |
| 柔性联轴器 | 允许驱动系统在一定范围内上下跳动的同时,平稳、准确地将扭矩传递到轮毂上 |
需要指出的是,在现有的内悬置电动轮构型研究中,可能由于空间限制,相关报道一般不涉及制动器的布置。考虑到现有技术水平及系统安全性的需求,仅依赖电机制动难以满足车辆的全工况制动力需求[1]。因此,本文在功能需求分析时,仍将制动器纳入考量。
通过对表 1中各零部件功能的分析,可归纳得出内悬置电动轮的基本功能如下:
1) 行驶功能:转向节、轮毂轴承、轮辋和轮胎等通过与路面的相互作用形成牵引力,并承受车辆的重量和地面的反作用力,从而保证汽车的正常行驶。
2) 驱动功能:轮毂电机将电能转化为机械能,通过直接驱动或经减速器增扭后为车辆行驶提供动力。
3) 制动功能:制动器通过液压或其他动力源,对车轮施加制动力实现车辆减速、停车。
4) 缓冲减振:轮内悬置和柔性联轴器两者可缓冲驱动系统受到的振动与冲击,并平稳、准确地将扭矩传递到轮毂上。
2 内悬置电动轮的形态学矩阵和拓扑连接
本节将根据内悬置电动轮的功能需求,寻找实现各功能的子方案,构建形态学矩阵与相关构件之间的拓扑连接图,为后续系统性枚举奠定基础。
2.1 形态学矩阵
下面将围绕行驶、驱动、制动和缓冲减振4个基本功能,分析潜在的子方案并分类。在寻找子方案的过程中,将忽略对轮内空间布局影响较小的构型变化。例如,不同轮辐造型、制动盘纹理和轮胎花纹等变化主要影响外观,对轮内空间的影响可以忽略。又例如,尽管异步电机和同步电机属于不同的电机子方案,但二者并不直接改变电机的几何形状及其空间占用。
为了减少乃至避免枚举不合理构型,将零部件分为2类:基准部件和非基准部件。基准部件是指其构型和位置对系统布局影响较大的部件;非基准部件是指其自身结构适应性相对强,占用空间相对小的部件。先确定基准部件的形态和位置,再配置适合的非基准部件,可有效减少排列组合的工作量和不合理构型数量。
分析轮内各零部件对空间布局的影响可知:1) 轮胎和轮辋构成的环形空间是轮内零部件布置的设计域,一般不考虑其形态变化。2) 转向节的结构形态主要由其他部件安装点决定,而且对轮内空间布局无直接约束作用。3) 轮内悬置作为电机与转向节间的弹性阻尼元件,可随其他部件的布置方式而采用不同的形式。4) 轮内联轴器一般直接与电机或减速器输出轴相连,可以看作驱动系统的一部分。因此,将上述零部件作为非基准部件,而将轮毂轴承、轮毂电机与制动器作为基准部件。
通常情况下,轮胎与轮辋是旋转部件,而转向节是非旋转部件。轮毂轴承、轮毂电机和制动器均包含旋转和非旋转部分:旋转部分与轮辋相连,而非旋转部分则连接至转向节。因此,轮内结构布局依赖于各零部件旋转和非旋转部分的相对空间位置。基于此观察,以旋转部分位于内圈或外圈为分类依据,将上述3类零部件划分为2种形态,由此得到表 2的内悬置电动轮的形态学矩阵。
表 2 内悬置电动轮的形态学矩阵 |
| 功能 | 形态1 | 形态2 |
| 制动 |  抱式制动器 |  反扣式或鼓式制动器 |
| 行驶 |  小直径常规轴承 |  大直径薄壁轴承 |
| 驱动 |  内转子实心电机 |  外转子空心电机 |
对于轮毂电机而言,内圈相对转向节旋转,对应的是内转子实心电机;外圈相对转向节旋转,对应的是外转子空心电机。对于轮毂轴承而言,内圈相对转向节旋转采用小直径常规轴承;外圈相对转向节旋转,需要采用大直径的薄壁轴承。对于制动器而言,内圈相对转向节旋转,对应的是常规抱式制动器;外圈相对转向节旋转,对应的是反扣式或鼓式制动器。
2.2 拓扑连接
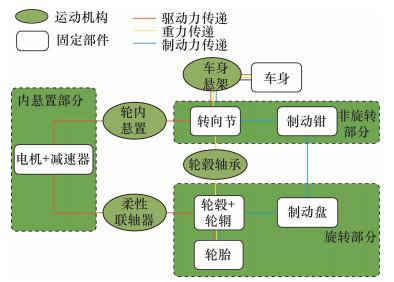
为了得到内悬置电动轮的总体构型方案,不仅需要形态学矩阵中的子方案,还需要明确子方案之间的连接方式。根据零部件之间的运动关系,绘制了内悬置电动轮的拓扑连接图,如图 4所示。
由图 3可以看出,车身通过车身悬架支撑于车轮转向节上,制动钳与转向节刚性连接,制动力由制动钳与制动盘间的摩擦力传递。转向节经由轮毂轴承与轮毂连接,既传递车身载荷,又确保转向节与轮毂间的相对转动功能。电机及减速器构成驱动模块,采用轮内悬置结构与转向节弹性连接。驱动模块的动力输出端通过柔性联轴器与轮毂相连,实现转矩传递。
理论上制动系统可转化为内悬置质量,与电机减速器模块共同悬置于车轮内部。然而,这种布置方式会使制动力必须经由柔性联轴器传递至车轮,从而导致制动响应滞后,影响行车安全性。鉴于制动力通常是驱动力的3~4倍,柔性联轴器需相应提升3~4倍的强度。这种强度的提升很可能会增加联轴器质量。此外,电机与制动系统的紧密布置会造成热源集中,不利于系统散热。基于上述考虑,图 3的设计方案中,制动系统未与轮内悬置集成,后续也就不再讨论相应的潜在构型。
3 构型方案的枚举与分析
根据第2章得到的形态学矩阵和拓扑连接图,可将各个子方案进行排列组合,得到多种内悬置电动轮构型,进而对各构型进行对比分析。
3.1 系统化枚举
根据表 2,轮毂轴承、驱动电机和制动器这3类基准零部件各有2种不同形态,相应地可以得到8种不同零部件组合方式。为了区分,采用3位二进制数字表示各种组合:3位二进制数字依次表示制动器、轮毂轴承和驱动电机;对应每一个子系统,数字1表示内圈旋转,0表示外圈旋转。进一步引入后缀以表示位置变型,这样每种方案可以用编号“XXX-i”表达:XXX为前述3位二进制数组合,i表示位置变型的序号。
需要指出的是,所谓位置变型是指同为内圈或外圈旋转的部件因位置调换而得到的新组合。例如,000表示3种部件均为外圈旋转,3个部件之间相对位置存在6种组合方式,其对应的编号为000-1至000-6。再例如,001表示制动器和轮毂轴承均为外圈旋转,驱动系统为内圈旋转。由于内圈部件和外圈部件在位置移动上互不干涉,001仅存在由外圈旋转部件的位置调换而得到的2种变型方案。进一步分析可知,只有000和111构型存在6种位置变型,其余构型均只有2种位置变型。理论上一共可获得24种构型方案。
表 3 采用内转子实心电机的可能方案 |
| 组合 | 111 | 101 | 011 | 001 |
| 位置1 |  |  |  |  |
| 位置2 |  |  |
表 4 采用外转子空心电机的可能方案 |
| 组合 | 位置1 | 位置2 | 位置3 | 位置4 | 位置5 | 位置6 |
| 000 |  |  |  |  |  |  |
| 010 |  |  | ||||
| 100 |  |  | ||||
| 110 |  |  |
3.2 构型分析
表 3为采用内转子实心电机的电动轮构型枚举结果。组合111表示3种零部件均为内圈旋转,即抱式制动器、小直径常规轴承和内转子实心电机的组合。该组合为基于内转子实心电机的最常见组合之一,继承了传统车轮结构,而将半轴直接替换为电机或动力系统。由于内转子实心电机的实心结构使其必须置于车轮最内侧,故该组合的位置变型仅有2种即111-1和111-2。这2种组合的区别在于轮毂轴承和制动器在轮毂上的位置不同。值得注意的是,引言中所介绍的丰田公司[9]、宝马公司[12]和高炳钊[10]均采用方案111-1,而侯之超[11]和陈辛波[13]则采用方案111-2。相比方案111-1,方案111-2的制动盘距离电机较远,制动盘产生的热量对电机的影响较小。方案101-1将传统的轮毂轴承替换为外圈旋转的薄壁轴承。这种轴承的使用较少,仅Höfer提出的Leicht Chassis[10]构型采用了该轴承。采用薄壁轴承有2个显著优势:一是可以缩短重力传递路径,二是简化了转向节的结构。方案011-1将方案111-1的抱式制动器改为反扣式制动器,利用电机和轮辋之间的环状空间,使电机更偏向车轮外侧以增大悬架空间。陈辛波[15]所提出的齿轮-摇杆-滑块内悬置电动轮均属于此种构型。组合001基于组合011,采用薄壁轴承替换了传统的轮毂轴承。由于制动器和轮毂轴承的非旋转部件均为内圈,组合001的结构可大大简化,将电机进一步偏移到车轮外侧,增大了悬架安装空间。组合001的2种位置变型源自制动盘和轮毂轴承的位置互换。方案001-1提供了更大的悬架安装空间,而方案001-2的制动盘距离电机更远,有利于系统的热管理。这2种构型使得联轴器的轴向尺寸较大,目前尚未有文献报道电动轮采用组合001。
表 4展示了采用外转子空心电机的可能方案。组合110是将组合111的内转子实心电机替换为外转子空心电机;通过调换制动器和轮毂轴承的位置,可以获得组合110的2种变型。在尺寸设计合理的情况下,方案110-2的制动器可移动至外转子空心电机的内部,以大幅提高空间利用率。罗玉涛[16]和张农[8]等均采用了该方案。由于外转子空心电机的热量主要来自电机定子,若制动器移动至中空电机的内部,电动轮的主要热源将被电机转子和轮毂包围,造成热源集中,散热面积减少。因此,散热性能是方案110-2面临的重要挑战之一。将组合110的抱式制动钳改为反扣式制动钳可得到组合100。相比组合110,组合100在悬架安装空间和热管理方面具有优势,普利司通[6-7]提出的电动轮方案即采用了方案100-2。组合010将传统轮毂轴承替换为薄壁轴承。相比组合110,组合010在悬架安装空间、轮内热管理和转向节复杂度方面并无明显的优势。组合000的部件均为外圈旋转,其车轮无需轮辐,可实现结构轻量化。此外,车轮中空结构有助于行驶过程中空气流通,提升外转子空心电机和制动器的散热性能。组合000共有6种位置变型。其中,方案000-1和000-2将电机置于车轮最内侧,占据了悬架布置空间,转向节需穿过电机连接到车轮外侧的制动钳和轮毂轴承;方案000-5和000-6将电机置于轮毂轴承和制动器之间,转向节也需穿过电机连接两者的非旋转部分。而方案000-3和000-4将电机置于车轮最外侧,可以简化转向节结构,并且为悬架布置提供更大空间。这2种方案明显优于该组合的其他方案。因此,在后文中,本类构型仅以方案000-3和000-4参与构型对比评估。
表 5总结了文献中内悬置电动轮构型方案与本节通过系统化枚举提出的各类构型方案的对应关系。需要说明的是,本节将电机与减速器视为一个整体,并将少数未考虑制动系统的电动轮构型归入相应的含制动系统的电动轮构型。可以看出,本文枚举的方案不仅涵盖了文献中报道的所有电动轮构型方案,还得到了一些新构型方案。后续的构型评价与选择将直接基于枚举构型分类开展,而不再逐个分析文献中的具体案例。
4 构型评估与选择
4.1 构型评估
概念设计阶段通常难以对潜在方案进行精确的量化评价,而偏好矩阵通过将量化评价转化为候选方案间的成对比较,广泛应用于工程设计领域。借助偏好矩阵,本节对3.1节基于枚举生成的内悬置电动轮构型进行系统评估。
实现内悬置电动轮面临的主要挑战包括:悬架硬点向车身内侧偏移、散热性能不足及轮内结构复杂等问题。因此,下面从悬架空间、散热性能和转向节复杂度3个角度定义评价指标,相关说明如下。
1) 悬架空间是指车辆悬架的布置区域,即车轮内侧的可用空间。车轮内侧预留空间的大小,直接决定了悬架外侧硬点的位置及摆臂长度。若悬架空间不足,会导致主销横向偏置距增加、车轮跳动行程受限以及车轮定位参数不稳定等问题,从而显著影响整车的动力学性能。
2) 电动轮的散热性能,主要面向制动器和电机。制动器和电机是车轮内部主要产热源。制动器温度过高会导致制动效能显著下降,而电机温度过高则可能引起内部磁场失效及工作效率降低。由于电动轮内部零部件布置紧凑,散热空间的合理性是评估电动轮构型的重要指标之一。
3) 转向节复杂度是指车轮转向节的结构复杂程度。作为轮内所有非旋转部件的关键支撑结构,转向节承担了安装轮毂轴承、制动钳以及内悬置弹簧阻尼元件等功能。此外,转向节还负责将车轮的六分力传递至车辆悬架,是重要的承载部件。转向节过于复杂不仅会显著增加制造难度,还会增大簧下质量,从而对整车性能产生不利影响。
根据工程经验和零部件几何特征,给出了3个评价指标对应的评价规则,如表 6所示。需要强调的是,这3个指标与电机和其他零部件结构息息相关。表 7的规则只是从零部件构型和布置的角度提出,更详细的布局及其评价还需要针对具体对象进行具体分析。
表 6 内悬置电动轮构型评价规则 |
| 评价指标 | 评价规则 |
| 悬架空间 | 车轮最内侧布置薄壁轴承优于反扣式制动盘 车轮最内侧布置反扣式制动盘优于外转子空心电机 车轮最内侧布置外转子空心电机优于抱式制动盘 车轮最内侧布置抱式制动盘优于内转子实心电机 电机偏外侧布置优于电机偏内侧布置 |
| 散热性能 | 外转子构型散热优于内转子构型散热 无轮辐结构优于带轮辐结构 电机与制动器之间距离大者更优 内转子实心电机匹配反扣制动盘优于外转子空心电机匹配抱式制动盘 |
| 转向节复杂度 | 轮毂轴承偏内侧布置优于偏外侧布置 轮毂轴承和制动器相邻优于二者中间布置电机 制动器偏内侧布置优于偏外侧布置 |
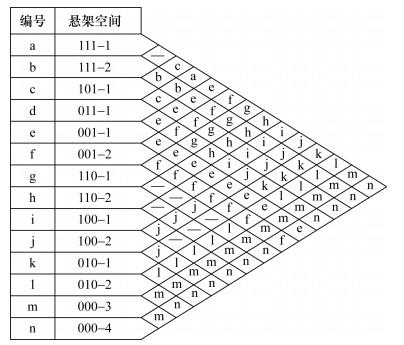
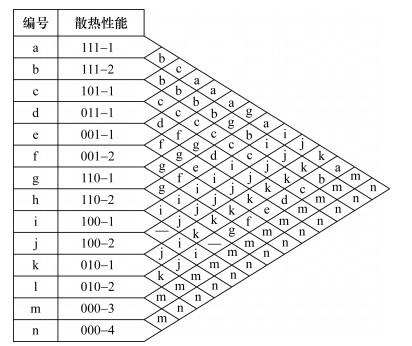
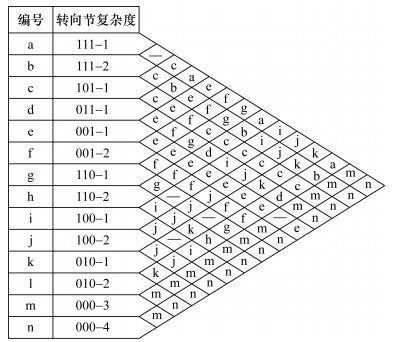
为方便后续分析中引用,偏好矩阵中对各构型方案按照顺序标注为a~n以简化命名。每个偏好矩阵由1列候选方案和其右侧的1个三角矩阵组成。按表格延伸方向,每个三角矩阵的元素对应2个左侧候选方案,该元素的值为2个方案中的优势方案。例如,三角矩阵最上方的元素对应的是某一评价指标下方案a和b中的优势方案。若其值为a,表示a优于b;若其值为b,表示b优于a;若其值为“—”,表示无法判断。以此类推,可对所有候选方案进行两两比较,直至填充完整个三角矩阵,而每个方案的得分即等于其在偏好矩阵中出现的次数。例如,若方案a在矩阵中出现10次,则其在该评价指标下的得分为10。按照上述方法,可分别构建不同评价指标下的偏好矩阵,并计算各构型得分,从而开展后续综合评价。
依据上述偏好矩阵,计算得到各构型不同评价指标下的评分结果,如图 7所示。
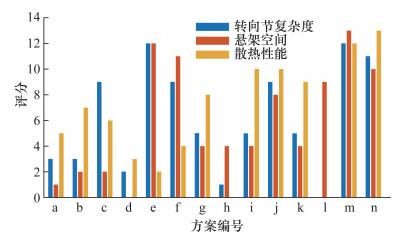
在转向节复杂度方面,方案e、m和n的评分较高,分别为12、12和11,表明这3种构型的转向节结构较为简洁,六分力传递路径短。构型l的评分最低,仅为0,说明其转向节的结构非常复杂,设计难度大。
在悬架空间方面,构型m的评分最高,为13,说明其在悬架空间方面的表现优异,为悬架硬点留有足够的空间。构型e和f的评分也较高,分别为12和11。相比之下,构型d的评分最低,表示其构型的车轮内侧空间十分拥挤或已被其他系统占据,难以安置悬架机构。
在散热性能方面,方案n的评分最高,为13,表现突出;其次是方案m,评分为12。而方案h和l的评分最低,均为0,反映出其散热性能不佳,电机与制动器距离较近且潜在散热面积不足。
结合图 7和表 6可以发现,现有的内悬置电动轮构型主要有a、b、c、d、h和j几种。其中a、b、c和d四种方案的悬架空间评分均较低,表明对应的轮内或轮侧空间不足,不利于悬架的安装。这正是现有内悬置电动轮构型的主要缺陷之一。构型h的悬架空间虽然优于a、b、c和d四种方案,但其散热性能评分为0,说明其散热性能最差。其主要原因在于,该方案将抱式制动器布置于外转子电机的中空区域内,使制动器与电机定子之间的距离过近。同时,热源被外转子空心电机包裹,潜在散热面积不足。文献中部分电动轮采用这种构型的主要原因在于其具有较高的空间利用率。j构型的综合性能在现有的电动轮构型中优势最大,其采用反扣式制动器代替了外转子空心电机内的抱式制动器,不仅隔离了热源,而且增大了悬架空间。
值得注意的是,本文所生成的方案m和n在3个评价指标上均优于现有的方案。其中,方案n在散热性能上优于构型m,但在总评分上略低于方案m。
4.2 方案选择与结构设计
根据4.1节评估结果,本节基于方案m,设计了一种新型内悬置电动轮及其车辆悬架系统的构型,如图 8所示。
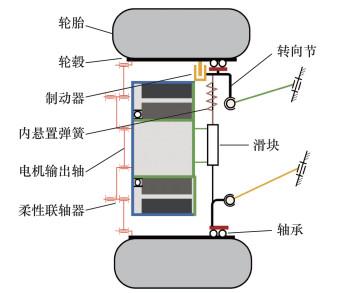
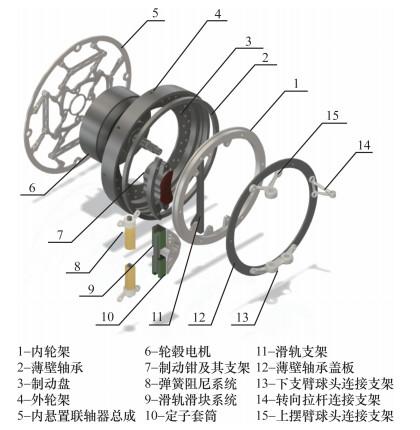
该构型的具体结构设计如图 9所示。车辆运行时,内轮架为非旋转部分,外轮架为旋转部分,两者分别与薄壁轴承的内外圈过盈配合以保证运动关系。车轮轮辋通过螺栓和外轮架固定连接。外轮架上还固定有制动盘,其与制动钳配合组成制动系统。制动钳通过支架与内轮架固定连接,内轮架上还固定有滑轨支架和内悬置弹簧阻尼系统。滑轨支架通过螺栓和滑轨固定。电机定子套筒左侧固定两个滑块并与滑轨滑动连接。内悬置弹簧阻尼系统压装在内轮架和电机定子套筒之间。薄壁轴承盖板通过螺栓将薄壁轴承锁定在内轮架上。下支臂球头连接支架、转向拉杆连接支架和上摆臂球头连接支架均固定于薄壁轴承盖板上,用于连接悬架机构。上述内悬置电动轮结构是为验证新构型而设计的原理样机,其结构尺寸和性能参数均为初步设计值,仍需在后续的实践中进一步优化。
5 结论
本文提出了一种基于系统化设计的内悬置电动轮构型枚举与评估方法,建立了内悬置电动轮的功能结构图和形态学矩阵,进而枚举得到了18种内悬置电动轮结构方案,不仅复现了已有的典型内悬置电动轮构型,还发现了多种可能的新构型。设计了一种新型内悬置电动轮构型,采用反扣式制动器与薄壁轴承,省去了车轮轮辐,大大拓展了轮内可用空间。另外,其电机置于车轮外侧,通过新型内悬置联轴器与轮辋连接,简化了电动轮转向节结构,并为悬架布置提供更多空间。相比现有构型,该构型在悬架空间、转向节复杂度和散热性能等方面更为优越,解决了内悬置电动轮零部件布置困难的问题。该构型已完成结构设计,后续将开展台架试验和整车实验,验证其性能表现,特别是在提高车辆舒适性和操控性方面的潜力。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}