

现有的研究已涉及了多种不同类型正向与反馈信道组合下的通信方案设计。对于支持无错反馈的场景:当正向信道稳定时,经典的Schalkwijk-Kailath(S-K)方案能在加性Gauss白噪声(additive white Gaussian noise, AWGN)信道中实现随码长双指数衰减的误码率[6-7],Horstein编码方案能以低复杂度达到二进制对称信道的容量[8];当正向信道经历衰落时,文[12]和文[13]提出了基于无噪延迟反馈(delayed feedback, DF)达到多状态信道容量的方案。此外,在有噪反馈信道场景中,在稳定正向信道下,一些反馈编码利用如级联码[14],格运算[9],全双工通信[15]等策略,在反馈有噪时继续保证了交互的可靠性;在衰落正向信道下,借助有噪反馈信道的自动请求重传技术(automatic repeat request, ARQ)[16-17]可以修正信道波动导致的误码,增强通信可靠性。然而,现有编码方案均未涉及非平稳反馈信道下的反馈编码。当反馈链路经历不稳定衰落过程时,上述基于稳定甚至无噪反馈假设的方案不再适用,原因为固定反馈周期和量化阈值的控制策略难以动态跟踪信道状态的时变性,导致系统对反馈信息的解码误码率呈指数级攀升,面临在极差状态下发生通信中断的风险,限制了交互传输性能。考虑到真实无线场景下,反馈过程很可能与正向传输一样面临这类信道衰落挑战[18-19],故相关研究的缺失将影响双向通信在真实场景下的部署。
因此,本文在文[9]中面向带噪声反馈信道的S-K方案总体架构基础上,提出了一种新的交互编码方案。该方案的核心思路是根据通信轮次及上轮通信信道状态自适应地配置该轮编码的能量增益乘数和解码的估计子等关键参数,从而提升对抗衰落信道噪声的预期效果。主要贡献如下:
1) 本文提出了一种面向双向有记忆快时变高斯信道的反馈编码方案,填补了现有反馈编码方案在非平稳反馈信道场景下的研究空白。
2) 在具体技术上,本文研究了给定功率约束下的时变信道多轮反馈能量分配优化问题,提出了一种在线能量分配策略,根据上轮信道状态动态分配本轮通信功率,从而获得了多轮传输等效信噪比数学期望的次优解。
1 模型设置
1.1 系统模型
如图 1所示,双信道连接着TA和TB 2个终端,TA为发送方,TB为接收方。TA到TB的正向主信道用于TA向TB传输消息;TB到TA的反向反馈信道允许TB向TA反馈边信息来增强通信。

每个码字的传输周期包含多轮双向交互,每轮交互有一次主信道上的正向通信和一次反馈信道上的反向反馈。对第n轮交互,双信道的输出建模为
其中:Xn、Yn分别为主信道的输入和输出变量,$ Z_{n} \sim \mathcal{N}\left(0, \sigma_{n}^{2}\right)$ 为主信道的方差为σn2的Gauss噪声;$ \widetilde{X}_{n}$ 、$ \widetilde{Y}_{n}$ 分别为反馈信道的输入和输出变量,对应的Gauss噪声为$ \widetilde{Z}_{n} \sim \mathcal{N}\left(0, \widetilde{\sigma}_{n}^{2}\right)$ ;2个信道噪声独立。2个信道均为快时变信道,即双信道的加性Gauss噪声分布均具有时变特性。具体而言,传输周期内每次交互的噪声方差σn2、$ \widetilde{\sigma}_{n}^{2}$ 会变化。假设主信道有H种状态,对应H个递增的噪声方差取值{u12, u22, …, uH2};反馈信道有T种状态,对应T个递增的方差取值{v12, v22, …, vT2}。同时定义2个随机变量Sn、$ \widetilde{S}_{n}$ 代表第n轮交互时2信道的状态:
1) 当主信道在第n轮交互时的状态Sn为h∈[1:H]时,即主信道处在第h个状态,其对应噪声Zn的方差σn2=uh2;
2) 类似,当反馈信道在第n轮交互时的状态$ \widetilde{S}_{n}$ 为t∈[1:T]时,即反馈信道在第t个状态,其对应噪声$ \widetilde{Z}_{n}$ 的方差$ \widetilde{\sigma}_{n}^{2}=v_{t}^{2}$ 。
每轮交互开始前,信道状态Sn、$ \widetilde{S}_{n}$ 均未知,但可以在发送后延迟检测获取该轮CSI。本文考虑有记忆信道状态转移,对一个包含N轮交互的传输周期,双信道每次交互中的信道状态组成的序列(S, S1, …, SN)和($ \widetilde{S}, \widetilde{S}_{1}, \cdots, \widetilde{S}_{N}$ )各自服从一阶Markov过程[20](S0, $ \widetilde{S}_{0}$ 代表双信道的初始状态),状态转移概率满足
对于每个n=1, 2, …, N。此处用(Ai)i=ab代表变量序列或列矢量(Aa, Aa+1, …, Ab),Pr(·)代表事件概率。换言之,Sn、$ \widetilde{S}_{n}$ 的概率分布只取决于上一轮状态Sn-1、$ \widetilde{S}_{n-1}$ 。相应的概率转移矩阵可以定义为H阶矩阵Q和T阶矩阵P, 用Q(i, j), P(i, j)分别表示矩阵Q, P的第i行、第j列元素,则
假设初始状态S0, $ \widetilde{S}_{0}$ 分别服从Q, P的平稳分布, 定义为$ \eta \triangleq(\eta(i))_{i=1}^{H}, \pi \triangleq(\pi(i))_{i=1}^{T}$ ,满足ηTQ=ηT, πTP=πT。因此,尽管在传输前难以获取信道状态,但可根据概率转移矩阵和上轮信道状态对当前状态进行估计。
1.2 传输问题陈述
针对上述交互信道,TA和TB间通过一个双向传输框架进行通信。总体而言,当TA需要向TB发送M元消息W,则W从一个消息集合{0, 1, ..., M-1}中均匀随机选取,双方通过N(N>1)轮交互传输完成通信。其中任意第n(n∈[1:N-1])轮的交互由一次正向发送和一次反馈发送组成。在正向阶段,TA将信号Xn输入到主信道,TB接收信道输出Yn;在反馈阶段,TB通过反馈信道回复另一个信号$ \widetilde{X}_{n}$ ,TA获得$ \widetilde{Y}_{n}$ 。在最后一轮(第N轮)交互中,TB不再反馈消息,而是根据所有接收到的信号((Yi)i=1N)解码消息W。故全过程包含N次正向发送和(N-1)次反向发送。
为了完成可靠交互过程,本文需要设计一个(N, R, P, $ \widetilde{P}$ , δ)交互编码方案来以速率R传输M元消息W,此处M=2NR。该编码方案包括:
1) TA端的N个编码函数:
其中:$ \mathcal{S}$ 、$ \widetilde{\mathcal{S}}$ 代表双信道状态取值域,$ \mathcal{S}=[1: H]$ ,$ \widetilde{\mathcal{S}}=[1: T]$ 。在每个第n轮的正向阶段,fn会将消息W和已有反馈消息$ \left(\widetilde{Y}_{i}\right)_{i=1}^{n-1}$ (在第1轮时没有)编码为主信道输入Xn。
编码会关联已知的已发生状态(Si)i=0n-1, $ \left(\widetilde{S}_{i}\right)_{i=0}^{n-1}$ 。
2) 给予TB的(N-1)个编码函数$ \widetilde{f}_{n}$ :
在每个第n轮的反馈阶段,fn会将上一轮反馈消息$ \widetilde{X}_{n-1}$ (第1轮时无)和已收到的消息(Yi)i=1n编码为反馈信道输入
编码关联已知的已发生状态(Si)i=0n, $ \left(\widetilde{S}_{i}\right)_{i=0}^{n-1}$ 。
3) 给予TB的1个解码函数φ:
解码N轮迭代过程中所有从主信道中接收到的消息YN,得到一个关于消息W的估计
解码会参考所有已发生状态。
编码方案会在远大于噪声功率的2个功率上限(P、$ \widetilde{P}$ )下进行传输,满足如下平均功率约束:
并在不超过一个微小的误码率阈值δ下完成消息恢复,即满足如下误码约束:
其中pe为方案的平均解码误码率。
给定功率上限P、$ \widetilde{P}$ 和误差阈值δ,如果存在一个(N, R, P, $ \widetilde{P}$ , δ)交互编码方案满足功率约束(见式(13)和(14))和误码约束(见式(15)),则称传输速率R在该双信道的N轮交互中是可达的,或称该编码方案在速率R下可达。可定义最优可达速率为
本文会引入容量差Γ度量方案的速率性能R:
这里$\overline{{\rm{SNR}}}$是主信道在平稳分布η下的平均信噪比,定义为$ \overline{\mathrm{SNR}} \triangleq \sum\limits_{i=1}^{H}\left(\eta(i) \cdot P / u_{i}^{2}\right)$ 。所以容量差Γ就代表了主信道真实平均信噪比$\overline{{\rm{SNR}}}$和达到方案速率R所需的Shannon理论最小信噪比之间的比率。Γ越小就说明方案速率性能越接近Shannon极限,传输越高效。
本文的目标就是面向上述带有噪声衰落反馈的衰落Gauss双向信道,设计高效可达的(N, R, P, $ \widetilde{P}$ , δ)交互编码方案;并优化方案速率性能R,为Ropt提供一个好内界。
2 反馈编码方案
本章详细描述了本研究所提的反馈编码方案。首先提出一般化的编码方案步骤和解码算法,随后根据具体信道状态转移概率和信道状态设置编码方案中参数,最后给出方案的可达速率内界RC。
2.1 编码方案框架
2.1.1 初始编码与首轮发送
首先,TA用具有单位功率的M级脉冲幅度调制(M-PAM),将消息集中的M个符号一一映射到$ \left\{-\frac{(M-1)}{2} d_{\min }, -\frac{(M-3)}{2} d_{\min }, \cdots, \frac{(M-3)}{2}\right. \left.d_{\text {min }}, \frac{(M-1)}{2} d_{\text {min }}\right\}$ 上,其中dmin为相邻星座点距离,$ d_{\text {min }}=\sqrt{\frac{12}{M^{2}-1}}$ 。TA用M-PAM将得到的消息W编码为对应码字θ。
在第一轮的正向阶段,TA向主信道发送符号X1(X1=α1θ),此处用αn代表第n(n∈[1:N])轮交互主信道编码增益。本方案会设置可根据已发生状态(Si, $ \widetilde{S}_{i})_{i=0}^{n-1}$ 自适应调整的αn,从而保证了N轮交互的主信道输入满足平均功率约束(见式(13))。TB收到主信道输出Y1后计算$ \hat{\theta}_{1}=Y_{1} / \alpha_{1}$ ,这里每个$ \hat{\theta}_{n}$ 代表第n(n∈[1:N])轮交互后TB对码字θ的最小均方误差(MMSE)估计子。
2.1.2 双向通信迭代
随后,双终端在每个轮次n(n∈[1:N-1])重复以下双向通信迭代过程:
1) 第n轮的反馈阶段:
TB编码反馈信道输入$ \widetilde{X}_{n}=\mathbb{M}_{d}\left(\gamma_{n} \hat{\theta}_{n}+V_{n}\right)$ 。这里γn代表第轮n(n∈[1:N])交互反馈信道的编码增益,其也会根据检测到的前项交互CSI进行自适应调整;变量Vn是均匀分布在[-d/2, d/2)区间内的抖动信号,每轮的Vn独立同分布(independent identically distribution, IID),假设Vn可被双终端知晓;$ \mathbb{M}_{d}(\cdot)$ 是模d函数,考虑到Vn服从均匀分布,本研究方案设置$ d=\sqrt{12 \widetilde{P}}$ 以保证信道输入满足平均功率约束(14)。
TA收到反馈信道输出$ \widetilde{Y}_{n}$ 。定义为$ \varepsilon_{n}=\hat{\theta}_{n}-\theta$ 为n轮交互后TB对θ的估计误差。TA估计εn为
上式利用了模运算的分配律。注意只要(γnεn+$ \widetilde{Z}_{n}) \in[-d / 2, d / 2)$ ,即不发生模数混淆,估计$ \widetilde{\varepsilon}_{n}=\varepsilon_{n}+1 / \gamma_{n} \cdot \widetilde{Z}_{n}$ 就会十分接近εn。
2) 第(n+1)轮的正向阶段:
TA向主信道发送符号Xn+1(Xn+1=αn+1γn$ \widetilde{\varepsilon}_{n}$ )。
TB收到主信道输出Yn+1,更新对θ的MMSE估计值为$ \hat{\theta}_{n+1}\left(\hat{\theta}_{n+1}=\hat{\theta}_{n}-\beta_{n+1} Y_{n+1}\right)$ ,其中:每个βn代表第n(n∈[2:N])轮对应的估计乘子,取值会关联真实发生的信道状态进行自适应调整。设置自适应乘子βn可以保证在不同状态下估计的准确性,协助TB在每轮交互中减小对θ的估计误差。
2.1.3 解码
N轮交互全部结束后,TB用最小距离解码器根据最终的$ \hat{\theta}_{N}$ 解码消息W,得到估计$ \hat{W}$ 。
其中$ \lfloor \cdot\rfloor$ 为向下取整函数。
2.2 方案参数设置
定理1 针对2.1节的方案设置自适应参数:
这些参数会根据N轮发送中的状态((Si)i=0N, $ \left.\left(\widetilde{S}_{i}\right)_{i=0}^{N-1}\right)$ ,在被调用前进行自动调整。其中:δn2为在每n(n∈[1:N-1])轮引入的一个附加变量,表示已知上轮反馈信道状态$ \widetilde{S}_{n-1}$ 后,下轮噪声的$ v_{\widetilde{s}_{n}}$ 的最可能取值(基于一步转移矩阵P),即:
L为本研究方案设置的一个松弛变量(L=D-1(p′m)),能使函数D(L)达到一个阈值$ p_{m}^{\prime}\left(p_{m}^{\prime} \triangleq \frac{\delta}{2(N-1)}\right)$ ,这里
关联方案每轮交互发生模数混淆概率的上界。其中:$ v_{(n) \mid \widetilde{S}_{n-1}=t_{n-1}}^{2}$ 代表已知上个状态$ \widetilde{S}_{n-1}=t_{n-1}$ 时的v(n)。
其中P′为功率阈值$ \left(P^{\prime}=\frac{P}{1+(N-1-2 / N) \cdot \lambda / 2}\right.$ ,$ \left.\lambda=\frac{3 p_{m}^{\prime} \widetilde{P}}{\widetilde{P} / L-v_{T}^{2}+v_{1}^{2}}\right) $ 。
1) 可根据延迟检测到的CSI进行最优估计和精确解码,在衰落场景下依旧保证每轮交互后可以减少噪声干扰,继续发挥反馈对通信的增强作用。
2) 可根据Markov信道的记忆性来预测最可能发生的状态,在发送方缺少实时信道状态信息(CSI for transmitter,CSIT)时指导编码,削弱信道不确定性影响,提高通信质量。
值得一提的是,如同本文所面向的信道模型可以通过设定特殊的信道状态和状态转移概率将模型退化为先前的无噪信道或无记忆信道,本文所提出的自适应编码方案也会根据相应设定退化为先前研究中所提出的方案。实验结果表明,本文所提编码方案在退化模型下性能依然优于或持平于现有编码方案在退化模型下的性能。
2.3 定理1中参数的推导过程
现对定理1中的参数设置推导过程进行阐述。本研究在满足可达性约束条件(式(13)—(15))的前提下,通过优化自适应参数实现可达速率性能R的最大化。具体而言,首先将方案参数优化问题简化为耦合系统下的优化问题,继而基于确保可达性的充分条件进行参数优化。
2.3.1 耦合系统
编码方案中的非线性取模运算增加了直接归纳参数与速率性能R、传输误码pe等关键系统指标的数学关系的难度,故本研究引入一个耦合系统[9]协助方案参数推导。耦合系统会具有相同的双信道场景设置,并使用和2.1节相同的编码框架完成双向通信,除了:编码在计算$ \widetilde{X}_{n}$ , $ \widetilde{\varepsilon}_{n}$ 时不再进行取模运算。下面讨论不进行取模运算的耦合系统和采用2.1节编码框架的原系统在编码方案设计中的区别和关联。
先规定除与原系统相同的信道噪声变量,其他耦合系统中的变量会附加一个上标(′)做区分。在耦合系统中,不进行取模运算会令TB对θ的估计误差ε′n服从Gauss分布。每n(n∈[1:N])轮交互通信就可以等价成一个从θ到$ \hat{\theta}_{n}^{\prime}\left(\hat{\theta}_{n}^{\prime}=\theta+\varepsilon_{n}^{\prime}\right)$ 的AWGN信道,其信噪比可以视为n轮交互后双向信道的等效信噪比。所有N轮交互后的等效信噪比代表了双向信道的最终通信质量,N轮等效信噪比越大则具备更优的速率性能。考虑到两系统在不发生模数混淆错误时具有一致性(因为原系统此时相当于也不进行取模运算),将原先的速率最大化问题简化为耦合系统下等效信噪比的最大化问题。其优化约束为原系统功率约束、误码约束(式(13)—(15))的松弛约束,如下所示。
1) 定义事件En为原系统中第n(n∈[1:N-1])轮TA估计εn时发生模数混淆;事件EN为N轮传输后PAM解码出错。类似为耦合系统定义事件$ E_{n}^{\prime} \triangleq\left\{\gamma_{n} \varepsilon_{n}^{\prime}+\widetilde{Z}_{n} \notin[-d / 2, d / 2)\right\}(n \in[1: N- 1])$ 以及$ E_{N}^{\prime} \triangleq\left\{\varepsilon_{N}^{\prime} \notin\left[-d_{\min } / 2, d_{\min } / 2\right)\right\}$ 。根据文[9]的推论1易得$ \operatorname{Pr}\left(\bigcup\limits_{n=1}^{N} E_{n}\right)=\operatorname{Pr}\left(\bigcup\limits_{n=1}^{N} E_{n}^{\prime}\right)$ ,则规定如下约束:
p′m, p′M是概率阈值,2个约束可保证p′m, p′M是概率阈值,2个约束可保证$ p_{e}=\operatorname{Pr}\left(E_{N}\right) \leqslant \operatorname{Pr}\left(\bigcup\limits_{n=1}^{N} E_{n}\right)= \operatorname{Pr}\left(\bigcup\limits_{n=1}^{N} E_{n}^{\prime}\right) \leqslant \sum\limits_{n=1}^{N} \operatorname{Pr}\left(E_{n}^{\prime}\right) \leqslant \delta$ ,即为原系统满足误码约束(15)提供了一个充分条件。
2) 设置一个新的功率上限P′,使每n(n∈[1:N])轮耦合系统的主信道输入信号E[(X′n)2]≤P′。规定如下约束:
其中λ如定理1中设置。该约束为原系统满足式(13)提供了一个充分条件(下一小节4)中证明)。此外,另一个功率约束(式(14))无需考虑,因为其在原系统中因取模函数而自动满足。
因此,原系统中速率最大化问题被简化为耦合系统下的对偶问题:在多个约束(见式(27)—(29))下,最大化N轮交互的等效信道(从θ到$ \hat{\theta}_{N}^{\prime}$ 的AWGN信道)的信噪比。下面将根据这些约束推导合理的参数设计,获得一个次优的等效信噪比,使本研究所提方案达到一个可观的速率性能。
2.3.2 参数推导
利用耦合系统逐一设计自适应参数αn, γn, βn和辅助变量,推导得到定理1中的参数设置。将前n(n∈[1:N])轮状态序列表示为$ \mathcal{C}_{n}\left(\mathcal{C}_{n} \triangleq\left(S_{i}\right.\right.$ $ \left.\widetilde{S}_{i}\right)_{i=0}^{n}$ ,并假设$ \mathcal{C}_{n}$ 可以在n轮发送后通过导频被检测到;定义δn2为ε′n的方差,于是n轮交互后的等价信道信噪比SNRn即满足SNRn=1/δn2(变量δn2不加上标(′)是因为模数混淆不发生时存在(ε′n=εn)。
1) 反馈编码增益γn:依据经典S-K方案设置γn(见式(20)),其中松弛变量L用于满足式(27)的约束;本研究新定义了一个附加变量v(n)(见式(24))作为对下个状态的估计,用于在CSIT缺失时协助编码增益尽可能匹配即将发生的状态。
2) 松弛变量L:可根据式(27)的约束确定L的取值范围。在给定前n轮的状态序列$ \mathcal{C}_{n}$ 时,事件E′n的概率满足:
可见Pr(E′n|n)只与L以及相邻状态$ \widetilde{S}_{n-1}, \widetilde{S}_{n}$ 有关;变量v(n)可以平衡不同状态$ \widetilde{S}_{n-1}$ 时的概率,使之总是接近常量$ 2 Q(\sqrt{3 L})$ 。接着利用全概率公式计算事件E′n的概率
可见每轮的Pr(E′n)是相同的,将其写为关于L的函数D(L),具体展开见式(25),其中$ \operatorname{Pr}\left(\widetilde{S}_{n-1}=\right. \left.t_{n-1}\right)=\pi\left(t_{n-1}\right)$ 是因为$ \widetilde{S}_{n-1}$ 在没给定$ \widetilde{S}_{n-2}$ 时会服从稳定分布π。根据式(27)的约束,需要保证D(L)≤p′m,或等价为L≥D-1(p′m)。根据贪心原则,将L取极小值以最大化编码增益γn,由此获得定理1中对L的设置。值得注意的是,D-1(p′m)的解析式一般难以获取,可以用二分法搜索法求解数值解。
3) 编码增益αn:根据耦合系统下功率约束,最大化编码增益αn使每轮主信道输入功率E[(X′n)2]达到上限P′。对于n=1,因为码字θ是单位功率,E[(X′n)2]=E[(α1θ)2]=α12,所以α1=$ \sqrt{P^{\prime}}$ ;对于n∈[2:N],在给定所有已发生状态$ \mathcal{C}_{n-1}$ 时,结合$ \widetilde{\varepsilon}_{n}^{\prime}=\varepsilon_{n}^{\prime}+1 / \gamma_{n} \cdot \widetilde{Z}_{n}$ ,可得:
根据$ \mathcal{C}_{n-1}$ 设置$ \alpha_{n}=\sqrt{\frac{P^{\prime}}{\widetilde{P} / L-v_{(n-1)}^{2}+v_{\widetilde{S}_{n-1}}^{2}}}$ 以保证总有E[(X′n)2]=P′。由此获得定理1中对自适应编码增益(αn)n=1N的设置。
4) 功率上限P′:比较两系统每轮输入符号Xn, X′n的功率以确定保证原系统满足式(13)的P′的取值范围。针对n=1,存在Xn=X′n,所以功率均为P′;针对n=2,因为取模运算,存在E[Xn2]≤E[(X′n)2]=P′;针对n∈[3:N],定义事件$ A_{n} \triangleq\left\{X_{n}=X_{n}^{\prime}\right\}$ 及其逆事件$ \bar{A}_{n}$ ,则
其中:如果事件$ \bar{A}_{n}$ 发生,则前(n-1)轮必存在模数混淆,故有$ \operatorname{Pr}\left(\bar{A}_{n}\right) \leqslant \operatorname{Pr}\left(\bigcup\limits_{i=1}^{n-1} E_{i}^{\prime}\right) \leqslant(n-1) p_{m}^{\prime}$ 此外,
将关于$ \operatorname{Pr}\left(\bar{A}_{n}\right)$ 和$ E\left[X_{n}^{2} \mid \bar{A}_{n}\right]$ 的上界代回式(33),可得到E[Xn2]≤[1+(n-1)λ]P′。因此,当N≥3时平均功率上界满足
该上界在N=1, 2时也成立,则证明了式(29)的约束是原系统满足功率约束(式(14))的一个充分条件。仍然根据贪心原则,优化P′取极大值以最大化编码增益αn,由此获得定理1中对P′的设置。
5) 估计乘子βn:根据上述参数推导最优的MMSE乘子βn,最小化第n(n∈[2:N])轮均方估计误差δn2(δn2=E[(ε′n)2])。在给定已发生状态$ \mathcal{C}_{n}$ 时,
则最优估计乘子$ \beta_{n}=\frac{\alpha_{n} \gamma_{n-1} \delta_{n-1}^{2}}{\alpha_{n}^{2}\left(\gamma_{n-1}^{2} \delta_{n-1}^{2}+v_{\widetilde{S}_{n-1}}^{2}\right)+u_{S_{n}}^{2}}$ ,根据式(32)替换$ \alpha_{n}^{2}\left(\gamma_{n-1}^{2} \delta_{n-1}^{2}+v_{\widetilde{s}_{n-1}}^{2}\right)= E\left[\left(X_{n}^{\prime}\right)^{2}\right]=P^{\prime}$ 和$ \alpha_{n} \gamma_{n-1} \delta_{n-1}=\sqrt{P^{\prime}-\alpha_{n}^{2} v_{\widehat{S}_{n-1}}^{2}}$ ,可获得定理1中对自适应最优估计乘子(βn)n=2N的设置。
6) 均方估计误差δn2:针对第n(n∈[2:N])轮,给定$ \mathcal{C}_{n}$ 时将最优估计乘子βn代回式(36),得到最小均方估计误差
这里SNR′n(SNR′n=P′/u2Sn)代表第n轮耦合系统主信道的信噪比。特别地,对n=1, 我们有$ \delta_{1}^{2}= E\left[\left(\hat{\theta}_{1}^{\prime}-\theta\right)^{2}\right]=E\left[\left(Y_{1}^{\prime} / \alpha_{1}-\theta\right)^{2}\right]=E\left[\left(Z_{1} / \alpha_{1}\right)^{2}\right]= u_{S_{1}}^{2} / P^{\prime}=1 / \mathrm{SNR}_{1}^{\prime}$ 。由此获得定理1中的(δn2)n=1N。
定理1中的参数设置推导完毕,其中自适应参数αn, γn, βn和δn2需要根据检测到的$ \mathcal{C}_{n}$ 实时设计,而辅助变量L和P′则须在传输开始前确定。
2.4 方案的可达速率性能
利用耦合系统根据可达性约束的充分条件推导得出了定理1中的参数设置。其中,基于贪心原则将多个参数设置为约束允许的极限值,为本研究所提方案提供了较大的编码增益αn, γn和合适的估计乘子βn。这些优化得到的自适应参数设计令多轮通信后的等效AWGN信道获得了一个次优通信质量(大的等效信噪比,或者说是小的估计误差δn2),从而允许一个次优的传输速率性能。给出如下定理归纳优化后方案的一个可达速率区域和区域上方案的最大速率。
定理2 使用定理1的参数设置,提出的自适应反馈方案可在如下传输速率区域上实现可达性,
其中函数G(R)对应耦合系统下最终PAM解码的错误率
定义区域式(38)上的最大可达速率为RC(RC=G-1(p′M)),为最优速率Ropt的确定提供了一个内界。
下面证明定理2中的速率区域(式(38))为可达的。在定理1的参数设置下,给定状态序列$ \mathcal{C}_{N}$ ,耦合系统下的N轮交互传输可以等价为信噪比E(θ2)/E[(ε′N)2]=1/δN2的AWGN信道,因此
根据全概率公式可计算得到
其中最后等式成立的原因在于:方差δN2的取值只和$ \left(S_{n}\right)_{n=1}^{N}, ~\left(\widetilde{S}_{n}\right)_{n=0}^{N-1}$ 有关。期望的展开式就是式(39)中给出的G(R)。易得所有满足的G(R)≤p′M速率R(即R≤G-1(p′M))都能使式(28)的约束成立。因此在定理1的参数设置下,当速率R≤G-1(p′M)时,方案在原系统下可达的充分条件(式(27)—(29)中的约束)被满足,这保证了可达性,由此可得定理2成立。
区域中最大速率RC是令Pr(E′N)达到阈值p′M的编码速率(RC=G-1(p′M)),对应了本研究方案经参数优化后可达到的一个次优速率性能。但值得注意的是,由于逆函数G-1(p′M)的解析式在多数情况下不可导出,因此RC通常只能用二分法求取数值解。
3 仿真结果比较
3.1 无衰落的理想稳定信道
在无衰落的理想稳定信道上,本研究所提编码方案严格退化为经典S-K编码方案。
在稳定场景下,1.1节的双信道会退化为AWGN信道,每轮交互的双噪声$ Z_{n}, \widetilde{Z}_{n}$ 有固定方差,可表示为$ \sigma_{n}^{2}=u^{2}, \widetilde{\sigma}_{n}^{2}=v^{2}$ 。静态的信道状态会使方案的自适应参数相应简化为如下形式:
其中:松弛变量L=[Q-1(p′m/2)]2/3;功率阈值$ P^{\prime}=\frac{P}{1+(N-1-2 / N) \cdot \lambda / 2}, \lambda=3 p_{m}^{\prime} L$ ;每轮主信道信噪比恒定为SNR′=P′/u2。因为固定的信道状态,所以此处暂不需要附加变量v(n)。本方案的可达速率区域同式(38),其中速率上界的解析式为
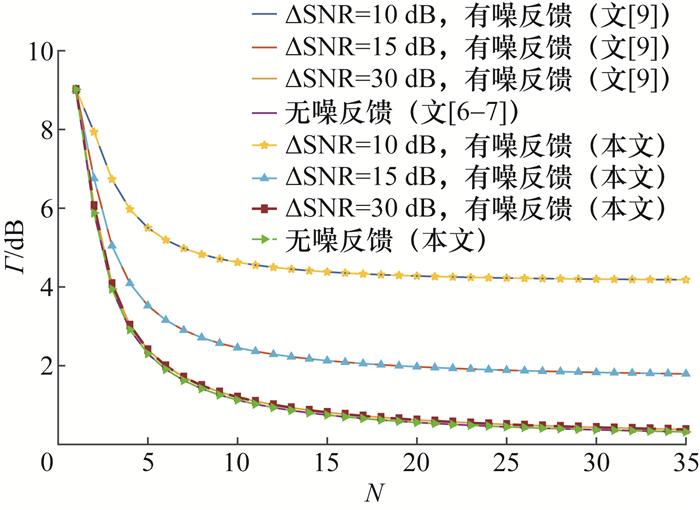
上述推导表明本研究所提方案虽然是面向不稳定通信场景设计的抗衰落改进版本,但在稳定无衰落的场景下仍然适用。同时,方案构造的自适应参数均会退化到与静态S-K方案[6-7, 9]一致的参数设计,达到相同的速率性能。在无衰落静态双信道场景下,双信道噪声方差为固定值:u2=0.15, v2= 0.02,设定误码率阈值δ=10-6、功率上限P=1。仿真实验中用Γ度量方案在不同信噪比比例ΔSNR下的速率性能RC,ΔSNR为反馈信道信噪比$ \widetilde{\mathrm{SNR}}$ 和主信道信噪比$ \overline{\mathrm{SNR}}$ 之比,即$ \Delta \mathrm{SNR} \triangleq \widetilde{\mathrm{SNR}} / \overline{\mathrm{SNR}}$ ,且$ \widetilde{\mathrm{SNR}} \triangleq \widetilde{P} / v^{2}, \overline{\mathrm{SNR}}=P / u^{2}$ 。通过改变反馈功率上限$ \widetilde{P}$ 可调整ΔSNR为10、15、30 dB以及正无穷(无噪反馈场景)。在不同ΔSNR条件下,用容量差Γ度量已有方案与本研究所提方案随交互次数N的变化,由图 2可知,本研究所提方案与静态S-K方案的性能表现完全一致,表明了本研究所提方案的通用性。
3.2 经历衰落的复杂双信道
针对双信道经历衰落的场景开展仿真结果的对比。
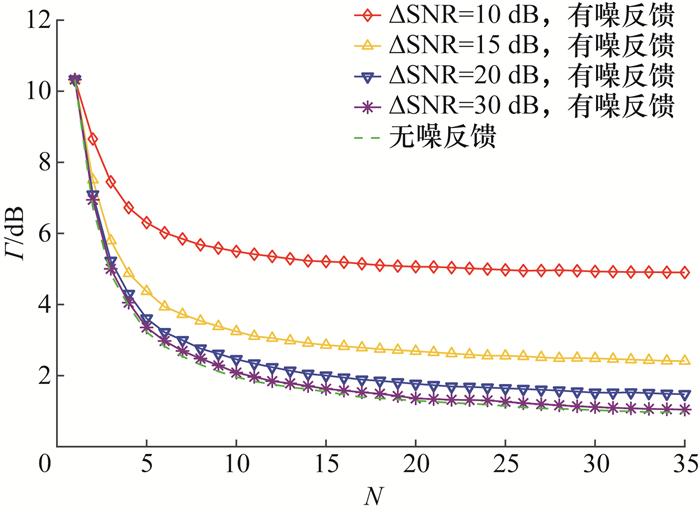
将1.1节的双信道假设为具有H=5个主信道状态和T=4个反馈信道状态的Markov信道。设定δ=10-6、P=1。因为考虑信道衰落,此处$\overline{{\rm{SNR}}}$$ \triangleq \sum\limits_{i=1}^{T}\left(\pi(i) \cdot \widetilde{P} / v_{i}^{2}\right)$ 为反馈信道平均信噪比。由于定义式(39)中G(R)的计算在H, T, N较大时是非常复杂的,所以在二分搜索时采用了Monte Carlo方法[21]近似计算RC的数值解。通过改变反馈功率上限$ \widetilde{P}$ 可调整ΔSNR为10、15、30 dB以及正无穷(无噪反馈场景)。在不同ΔSNR条件下,用容量差Γ度量已有方案与本研究所提方案随交互次数N的变化,由图 3可知,N=1时,尚无反馈发生,所以ΔSNR不同取值对应相同的Γ;随着N的增加,Γ逐渐减小,且ΔSNR取值越大则Γ的减小幅度越大,这表明传输过程可以通过反馈交互逐渐提高通信的效率和可靠性,且越清晰、噪声越小的反馈对传输的增益越明显。经历约25轮交互后,Γ基本收敛至一个较低值,这表明本研究所提方案发挥了反馈的优势使误码率快速衰减,从而允许短码长的码字传输。

为了更直观地评估性能差异,进一步对比了各方案在设定误码率、功率约束下的可达速率性能RC。由图 5可知,本研究所提方案在2类反馈场景下均可以设置更高的编码速率,可以提供一个更接近适应性容量CM-NF的可达方案速率内界,表明了方案的优越性。

4 结论
本文通过研究具有不稳定反馈的有记忆衰落高斯信道上的交互通信,提出了一种反馈编码方案以实现衰落环境下的高效传输。首先,根据时变的信道状态自适应调整正向传输和反馈过程中的编解码参数,该方案实现了更通用的拓展S-K编码。同时,通过求解耦合系统下的对偶优化问题,该方案可对编码参数和码本设计进行合理设计与构造,并达到了次优的传输速率性能。仿真比较和数学分析表明,所提方案在衰落场景下性能优于经典S-K反馈编码方案,对不稳定信道波动具有更强的鲁棒性。因此,本研究所提出的自适应交互设计可作为未来更复杂、更随机的5G/6G无线通信应用中更具竞争力的可靠传输方案。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}