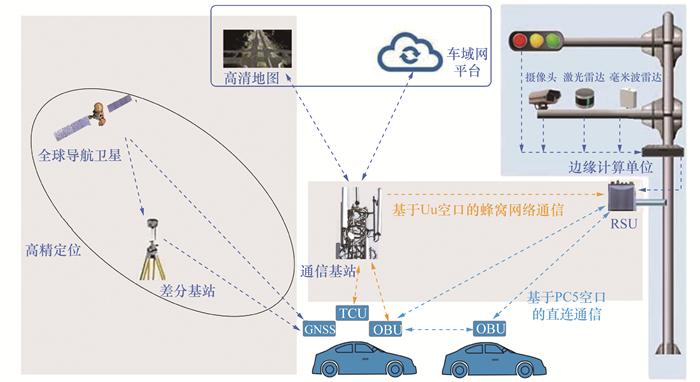
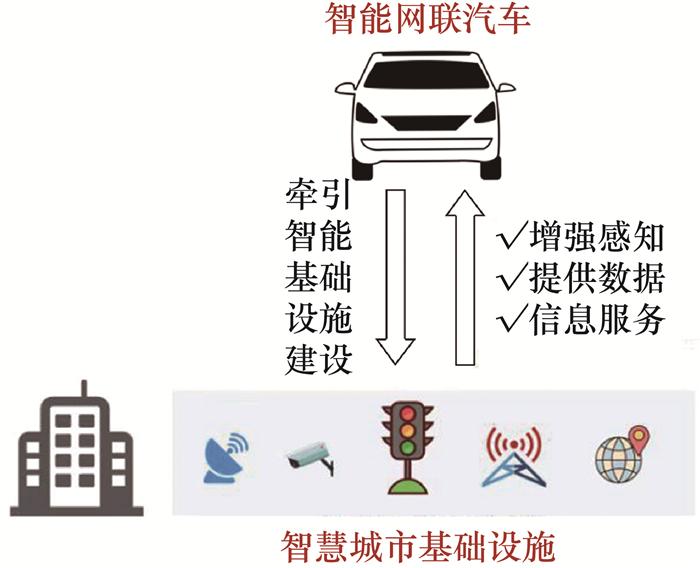
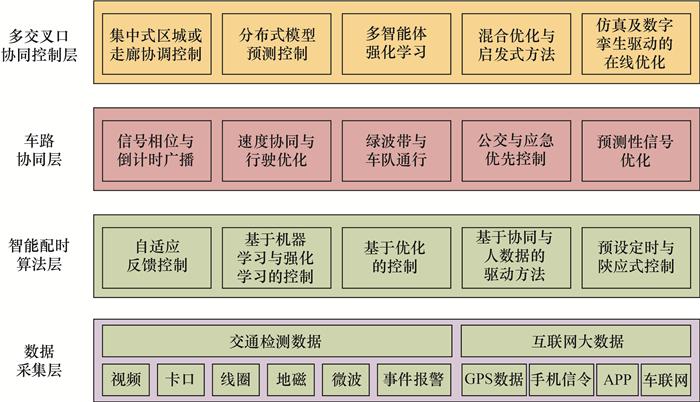
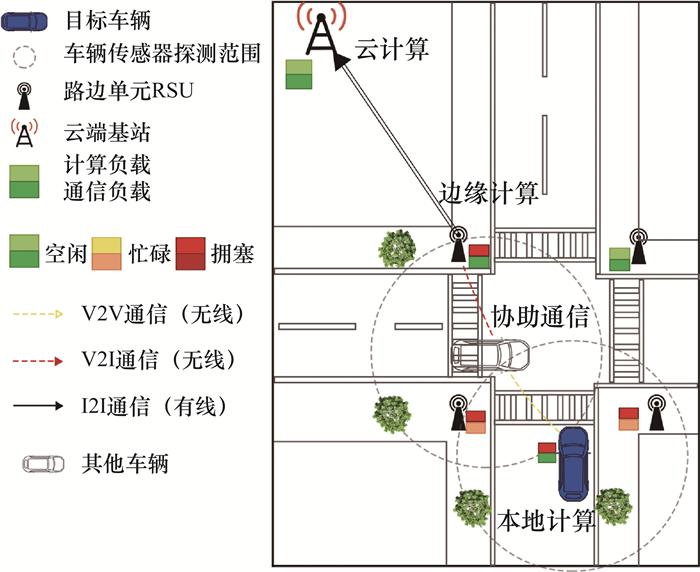
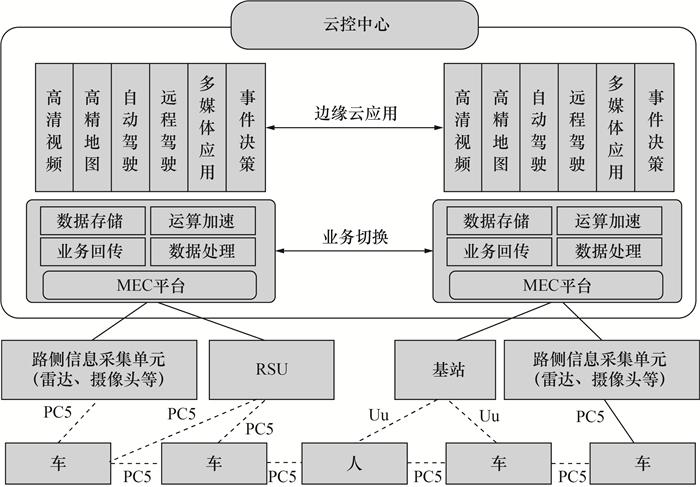
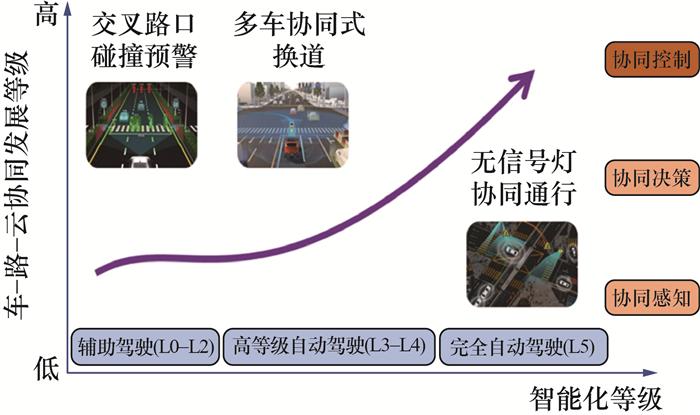
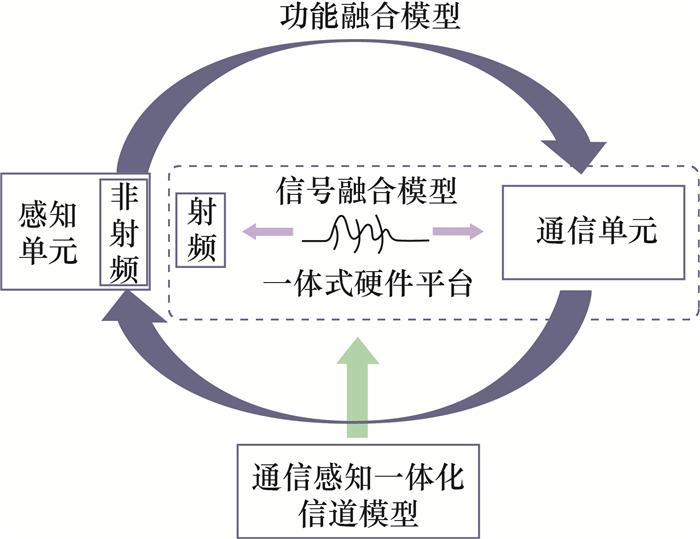
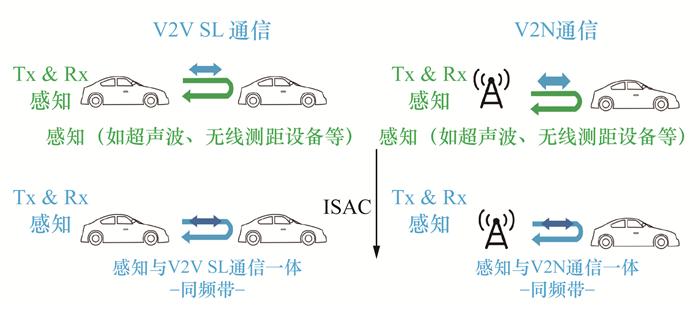
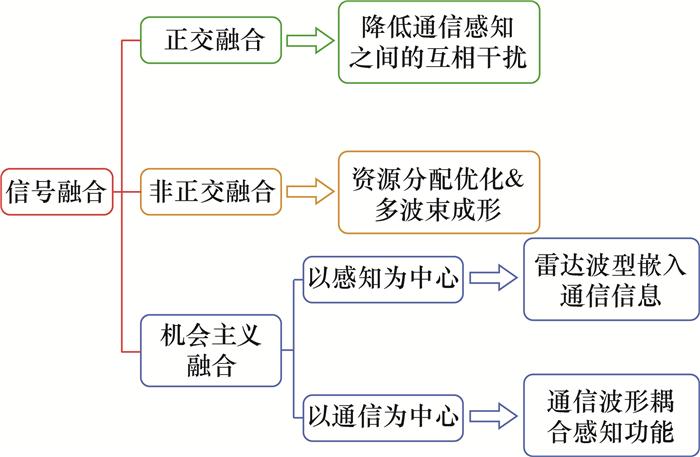
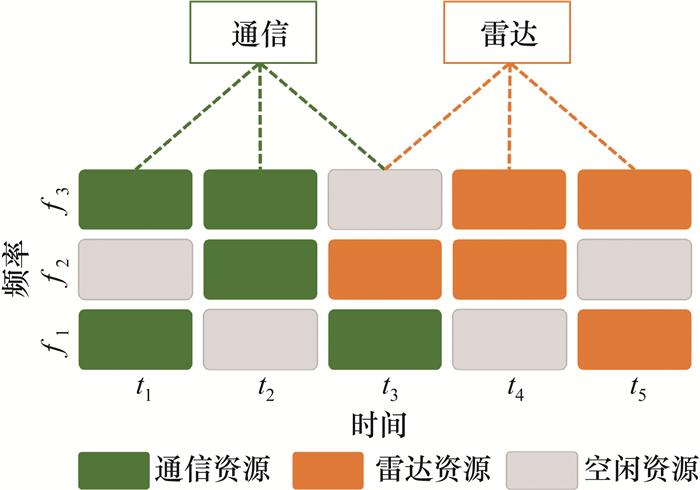
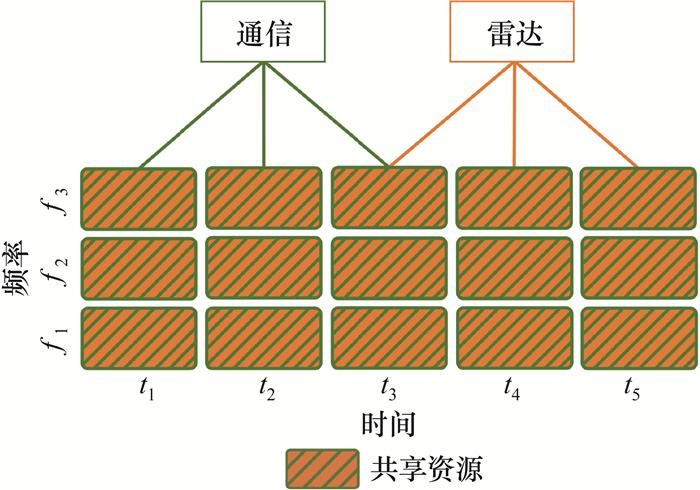
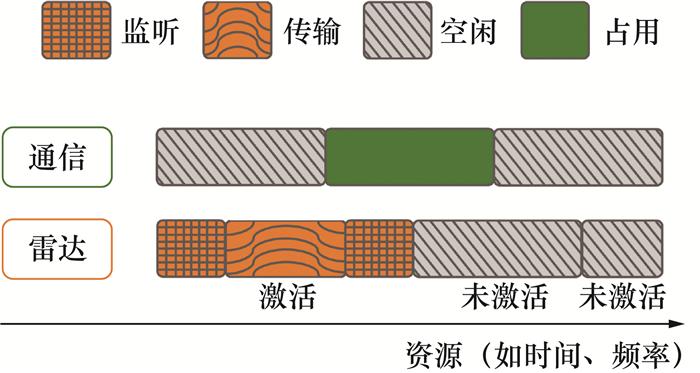
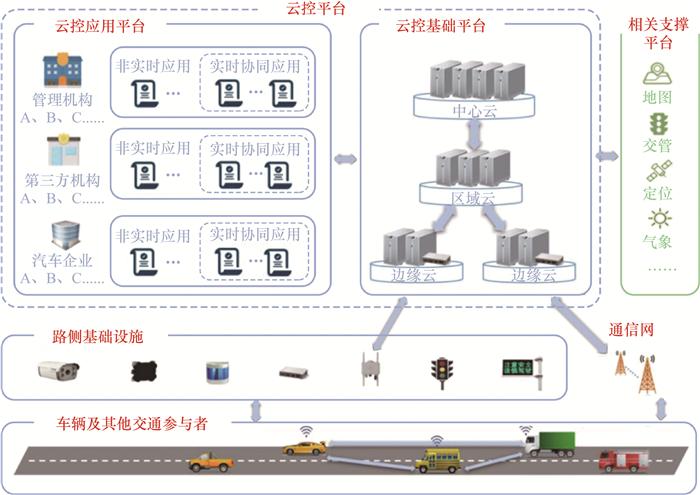
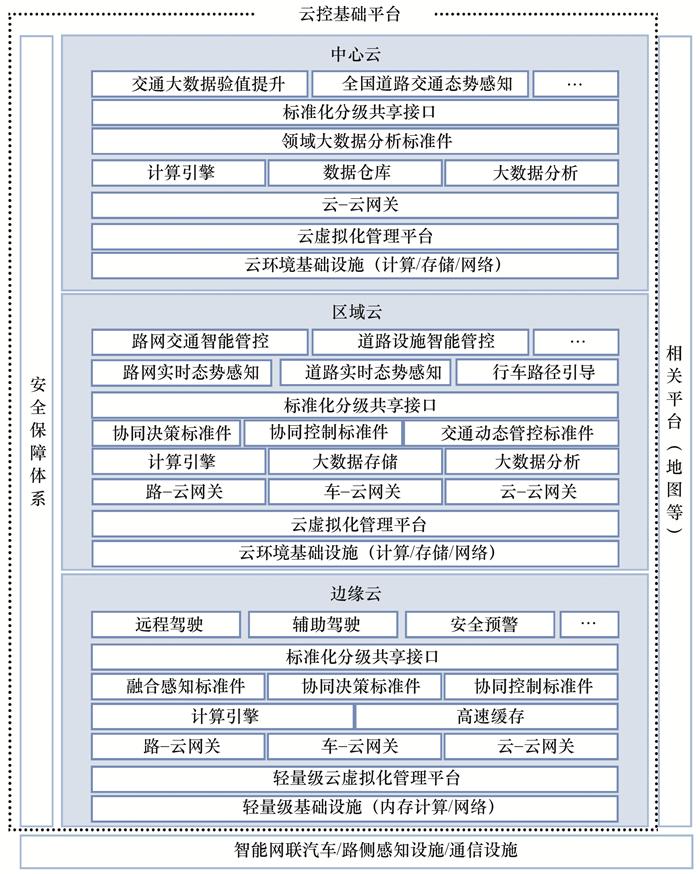
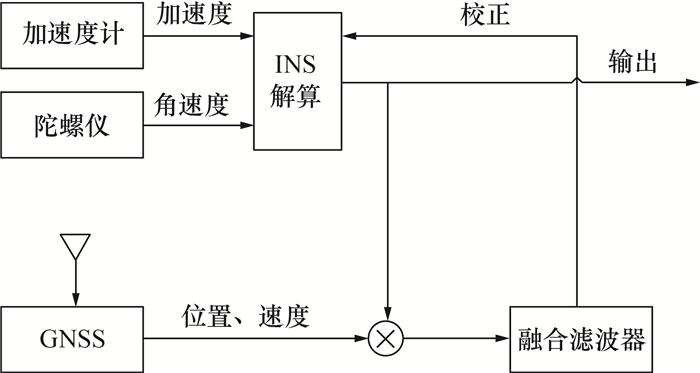
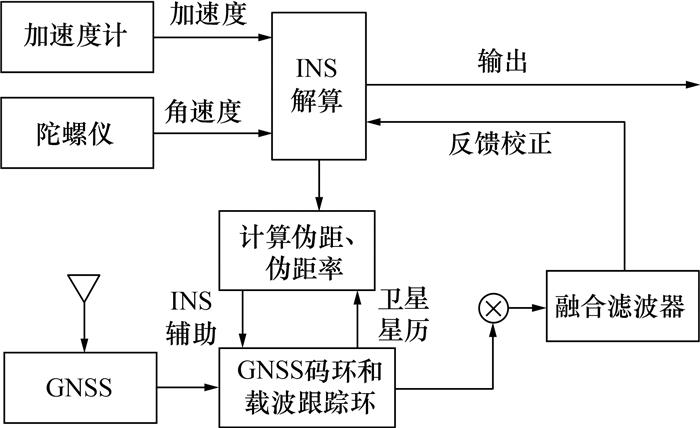
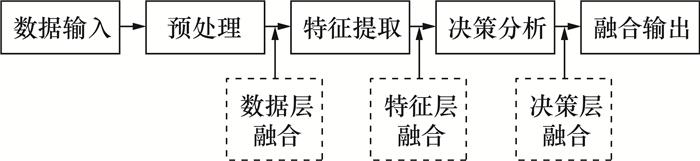
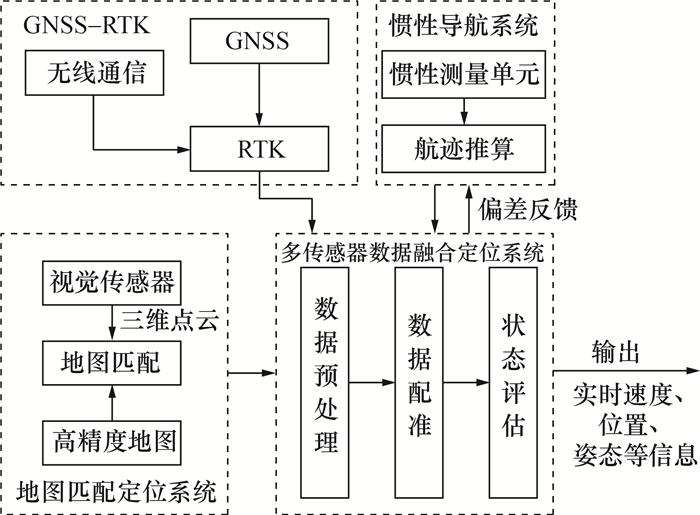
Significance: With the rapid advancement of new-generation information technologies, the deep integration of smart city infrastructure and intelligent connected vehicles (ICVs) has emerged as a critical engine for the intelligent transformation of urban transportation. Traditional single-vehicle intelligence often faces limitations such as blind spots, occlusions, and limited perception ranges in complex urban scenarios. Therefore, it is essential to move beyond the independent operation of "human-vehicle-road" units to build an integrated, collaborative "vehicle-road-cloud" ecosystem. Such integration is pivotal for resolving information islands, enhancing traffic safety and efficiency through a closed-loop mechanism of "perception-transmission-calculation-control, " and promoting sustainable urban governance by reducing congestion and carbon emissions. Progress: This study systematically reviewed the research progress, technical architectures, and development trends of this "dual-intelligence" synergy. First, from the viewpoints of operational logic and core architecture, the study elucidated how smart cities empower ICVs. By deploying roadside perception networks and mobile edge computing nodes, the infrastructure provides ICVs with beyond-visual-range information and enables high-precision navigation through digital twin technologies and high-definition maps. Conversely, ICVs act as mobile sensors, providing real-time trajectory and status feedback to the cloud, thereby facilitating traffic situational awareness and decision optimization (e.g., adaptive signal control and congestion management). This interaction establishes a robust multi-level vehicle-road-cloud system framework. Second, a comparative analysis of international development paths was performed to reveal distinct strategies. The United States has traditionally prioritized vehicle-side intelligence (e.g., Tesla's vision-based approach) but is increasingly transitioning toward C-V2X communication standards following spectrum reallocation. The European Union focuses on cross-border interoperability and standardization through projects such as C-Roads, emphasizing data privacy under GDPR. Japan and South Korea rely on government-led legislation and integration of automated driving with high-precision 3D mapping (e.g., SIP-adus and K-City). China adopts a "top-down" design with large-scale dual-intelligence pilot zones in cities such as Beijing and Wuhan, promoting the rapid deployment of 5G-V2X and standardized roadside infrastructure. Furthermore, the study deeply explored the key enabling technologies that support this synergy. Integrated Sensing and Communication, which optimizes spectrum and hardware resources through functional fusion (data sharing) and signal fusion (unified waveforms), was analyzed in detail. Moreover, the study analyzed the hierarchical cloud control system, comprising edge, regional, and central clouds. This system balances real-time local control with global data mining and long-term optimization. Additionally, multisensor fusion positioning algorithms were examined to illustrate the integration of GNSS, INS, and LiDAR through loose, tight, or deep coupling mechanisms. Such integration ensures robust centimeter-level positioning, even in GNSS-denied environments like tunnels or urban canyons. Conclusions and Prospects: Despite significant achievements, the collaborative development of smart cities and ICVs faces multifaceted challenges. These include technological bottlenecks in automotive-grade chips and algorithm adaptability, barriers in cross-industry protocol compatibility, and prominent risks regarding data security and privacy protection in cross-border transmission. Consequently, future research must focus on several key directions: achieving semantic alignment and unified representation in multimodal sensing fusion to handle heterogeneous data, developing adaptive protocols based on software-defined networks to ensure compatibility, optimizing dynamic edge-cloud computing resource scheduling to meet real-time demands, and constructing active immune network security frameworks to defend against intelligent cyber-attacks. This study provides a comprehensive theoretical reference and technical support for fostering the deep integration and scalable application of smart city infrastructure and ICVs.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}