

漂浮式风机根据支撑结构的不同可分为4种类型(张力腿式、驳船式、单柱式和半潜式)。考虑到中国深远海区域的水深、海况和建造条件,半潜式风机更为适应市场需求[12]。目前,风机中心布置的Y形和偏心布置的Δ(Delta)形半潜式平台是半潜式风电平台的主流形式,Y形半潜式平台包括中国的海油观澜号,美国国家可再生能源实验室的VolturnUS和挪威Dr.techn. Olav Olsen AS的OO-Star等,Δ形半潜式平台包括国内的三峡引领号、中船扶摇号和国能共享号以及美国Principle Power, Inc的WindFloat和日本丸红株式会社的V-Shape等。然而,针对2类半潜式风机的动力特性对比分析,已有研究多为定性分析[13],定量对比仍存在不少难题,例如当前海上漂浮式风机的数值分析方法不太完备,极限和长期动力特性尚不明确;不同已建测试样机所采用的风机功率、设计标准和建造技术差异显著;可能存在技术壁垒和商业保密行为等。
缩尺模型试验和数值模拟是研究漂浮式风机动力特性的主要方法。缩尺模型试验虽然具有操作复杂,费用昂贵等不足,但仍是捕获复杂海洋环境中的强非线性现象的有效方法之一[14],根据部件缩尺模型的完备情况,模型试验可分为半实物模型试验和全实物模型试验。半实物模型试验对系统的部分结构进行缩尺以建立实物模型,未缩尺部分采用数值模型进行等效。目前常见的是基于数值风机和数值浮体的半实物模型试验[12]。基于数值风机的半实物模型试验方面,Azcona等[15]早期采用一个涵道式风速模拟器实现风机叶轮气动荷载的加载。之后,Sauder等[16]采用多根牵引绳实现机舱位置处的气动力的加载,然而,牵引绳的引入也存在一定的负面干扰。近年来,采用旋翼组模拟风机气动荷载的方法备受众多学者的关注和青睐。Azcona等[17]将四旋翼组应用于INNWIND 10 MW张力腿式风机的水池试验。Wen等[18]开发了组合式多通道气动荷载模拟器, 并对其静/动态性能展开详细而系统的测试和评估,取得了较为优异的成果。基于数值浮体的半实物模型试验方面,米兰理工大学建立了基于物理风机和数值浮体的半实物模型试验方法[19]。之后,上海交通大学也搭建了由漂浮式平台数值模型、风机缩尺物理模型和运动模拟平台组成的海上漂浮式风机混合模型试验系统[20-21]。全实物模型试验则对整个系统(包括叶轮、机舱、塔筒、平台和系泊等)进行缩尺,并模拟生成真实的物理风场和波浪场以完成试验测试,具有更高的测试完备性。美国缅因大学通过全实物模型试验的方式重点对比了DeepCwind的半潜式、单柱式和张力腿式风机的动力响应[22]。Tri-Floater三立柱半潜式风机在荷兰的Marin水池完成了试验测试[23]。Chen等[24]利用1∶50缩尺模型研究了OC4半潜式风机的空气动力学特性。Ahn等[25]对10 MW半潜式风机进行了稳态风、规则波和海流条件下的模型试验测试,遗憾的是,该研究并未考虑反映真实海况的随机波浪条件。Michailides等[26-27]的研究集成了半潜式风机平台与波浪能发电装置,结果表明了该装置在极端条件下的良好性能表现。Gao等[28]通过1∶50的物理模型验证了半潜式风机和摆式波浪能装置的效能。
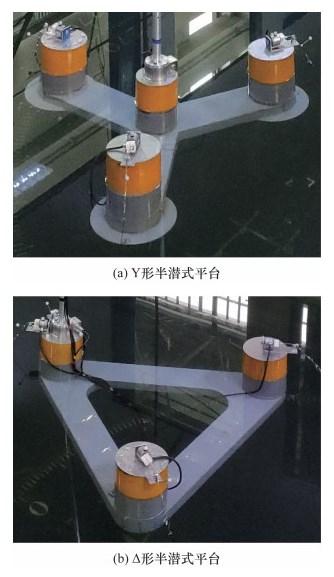
为了满足设计方案的可比性前提,实现针对2类半潜式风机动力特性的定量对比,本研究基于DTU 10-MW风机,首先以系统成本和疲劳损伤为优化目标,以平台和系泊的主尺寸为优化变量,分别优化设计了Y形和Δ形半潜式平台和系泊系统;进而基于相似准则设计并建立了缩尺比为1∶70的半潜式风机试验模型,在风洞和浪槽中联合重现风场和波浪场条件,采用全实物模型试验方法对比2种半潜式风机在风机额定作业和极限自存状态下的动力特性,以期望为深远海风电半潜式风机平台的选型和设计提供依据。
1 半潜式风机的结构布置
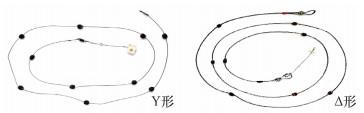
本研究采用的Y形半潜式平台以OO-Star半潜式平台[29]为参考,也据此设计Δ形半潜式平台,具体的结构布置分别如图 1和图 2所示。2个平台均为搭载10 MW风机而设计,该风机满足IEC 1A类海上风场条件的要求。半潜式平台一般由数个立柱以及连接立柱的浮舱组成,并采用系泊系统对平台进行运动限制,因此,本研究所设计的Y形半潜式平台具有4个圆柱形立柱(1个主立柱和3个外立柱)和3个立方体浮舱,浮舱呈Y形排布,风机位于主立柱上,呈中心布置(风机重心与平台的重心和浮心均处于同一垂线上);Δ形半潜式平台具有3个圆柱形立柱(1个主立柱和2个外立柱)和3个立方体浮舱,浮舱呈Δ形排布,风机位于主立柱上,呈偏心布置(风机重心与平台的重心和浮心在垂向方向上不共线)。Y形和Δ形半潜式风机的系泊缆均采用无档索链。在垂向投影上,系泊缆与浮舱的轴线平行,导缆孔位于立柱顶端外缘,Y形半潜式风机具有3根互呈120°的系泊缆,而Δ形半潜式风机采用4根系泊缆,系泊缆之间呈60°或120°。
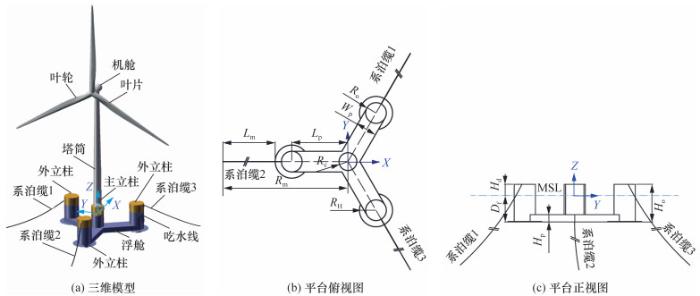
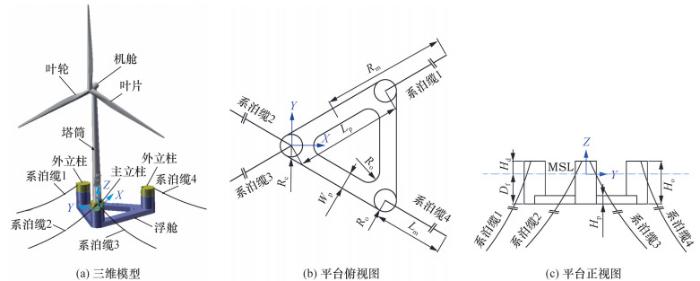
表 1 半潜式风机的相关参数 |
| 参数 | 取值 | 参数 | 取值 | |||
| Y形 | Δ形 | Y形 | Δ形 | |||
| 风机容量Pwt/MW | 10 | 10 | 系泊直径Dm/mm | 150 | 140 | |
| 水深Dw/m | 130 | 130 | 钢板等效厚度tw/mm | 90 | 80 | |
| 吃水深度Df/m | 18 | 18 | 平台排水量Vw/m3 | 1.62×104 | 1.77×104 | |
| 气隙高度Hd/m | 7.67 | 7.67 | 平台总质量Mp/kg | 1.46×107 | 1.59×107 | |
| 主立柱半径Rc/m | 6 | 7 | 重心惯量Ixx/(kg·m2) | 6.75×109 | 1.19×1010 | |
| 外立柱半径Ro/m | 7 | 7 | 重心惯量Ixz/(kg·m2) | 0 | 4.45×108 | |
| 垂荡板半径RH/m | 11.5 | — | 重心惯量Iyy/(kg·m2) | 6.75×109 | 7.17×109 | |
| 立柱间距Lp/m | 38 | 68 | 重心惯量Izz/(kg·m2) | 1.26×1010 | 1.80×1010 | |
| 浮舱高度Hp/m | 5 | 5 | x | 0 | -45.75 | |
| 系泊长度Lm/m | 700 | 700 | 重心COM/m | y | 0 | 0 |
| 系泊锚泊距离Rm/m | 700 | 700 | z | -12.80 | -12.92 | |
2 半潜式风机的缩尺模型

3 模型试验设置
3.1 大气边界层风洞与浪槽联合实验室
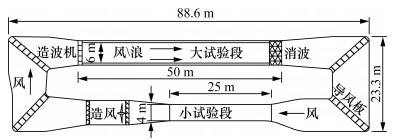
半潜式风机的模型试验在哈尔滨工业大学大气边界层风洞与浪槽联合(WTWF-HIT)实验室进行。如图 6所示,实验室为闭口回流式矩形截面风洞,并配置有波浪水槽,可保证真实海况风浪场的高质量可控重现,实现风浪联合作用下海上结构的试验测试。WTWF-HIT实验室设置了2个试验段(小试验段和大试验段),小试验段为风洞试验段,可模拟较高质量的大风速风场条件;大试验段为风洞-浪槽耦合试验段,可实现灵活可调的组合风浪场。根据试验对象和目的,本研究的模型试验主要在大试验段完成。
3.2 试验测试平台与仪器设备
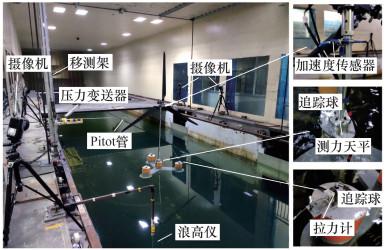
根据动力响应特性和试验条件,本试验主要对半潜式风机的平台运动、机舱加速度、塔基荷载和系泊导缆孔张力进行测试。Y形和Δ形半潜式风机所测试参数及仪器布置方式一致,以Y形半潜式风机模型为例,试验测试平台的现场搭建如图 7所示。采用压力变送器和Pitot管实现风速的实时测试,并在移测架配合下获得风剖面。电容式浪高仪用于监测波高时程。风机塔筒底部安装有六分量测力天平,以实现塔基荷载的实时测试。加速度传感器固定于机舱,用于测量机舱的顺风向加速度。导缆孔处的水下拉力计可以获得系泊缆张力时程。试验模型的六自由度运动由立体视觉测量系统捕获,该系统主要由跟踪球和高精度红外摄像机组成。本试验环绕试验模型在水槽边上共架设了6台红外摄像机,有效避免视觉采集丢帧的问题,确保试验测试的精度。通过精细校准,立体视觉测量系统的误差可以良好地控制在1 mm以内。本研究中,立体视觉测量系统通过6台红外摄像机实时记录分别附着在立柱顶部的跟踪球的三维空间坐标,并将三维空间坐标转换为6个自由度运动时程。
3.3 试验工况
4 结果与分析
4.1 环境条件标定
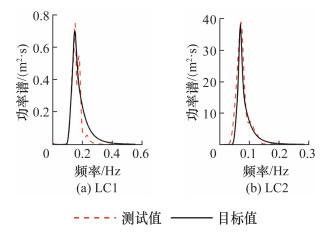
如表 3所示,随机波浪的谱峰周期和有义波高的测试值和目标值吻合度较高。因此,本研究利用WTWF-HIT实验室能够很好地模拟和再现特定的海洋环境条件,并具有较高的精度。
表 3 模型试验的波浪参数 |
| 试验工况 | 有义波高/m | 谱峰周期/s | |||
| 目标值 | 测试值 | 目标值 | 测试值 | ||
| LC1 | 2.23 | 2.12 | 6.74 | 6.85 | |
| LC2 | 10.65 | 11.05 | 14.13 | 13.88 | |
4.2 风机荷载标定
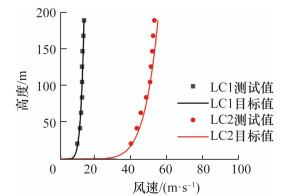
风电机组部件众多,其缩尺设计具有一定复杂性,缩尺模型的所有物理参数难以全部满足相似比的要求。本模型试验采用文[31]设计和制作的风电机组缩尺模型,在保证叶尖速比严格相似的前提下,选取合适的叶片桨距角以实现目标塔基荷载的相似等效。风机叶轮转速可以由机舱内伺服电机精准控制,而叶片桨距角通过轮毂的角度调节器手动精确调节。值得注意的是,半潜式平台的风致倾角将导致塔基剪力和弯矩额外包含风机重力分量部分,故在塔基荷载标定试验中,风机塔筒采用固底方式安装,即风机直接安装在风洞实验室的底板上,而不是浮动的半潜式平台上。为了排除风剖面对风机气动效应的影响,固底安装的风机机舱的高度位置与半潜式风机的机舱位置一致。2个试验风场条件下的风机塔基剪力和弯矩的测试值与目标值对比如图 10所示。由图可知,测试值与目标值吻合度较高,表明本研究设计和制作的风机缩尺模型可以正确模拟塔基荷载,可以满足后续相关试验的要求。

4.3 试验模型物理参数识别
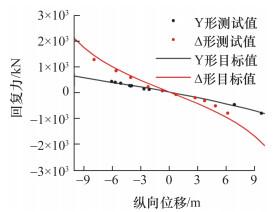
系泊系统的核心功能是对半潜式风机的位置和运动进行有效约束,确保风机在复杂海洋环境下的稳定性和安全性。本研究采用静水试验方法获取系泊刚度特性。Y形和Δ形半潜式风机的系泊系统回复力-位移关系曲线如图 11所示,由图可知,系泊回复力的测试值与目标值吻合度较高,说明模型试验中的系泊长度、配重、刚度和锚距等关键参数与目标模型参数基本一致,且本模型试验的水深设置也较为合理,设计的系泊系统缩尺模型能够合理和准确地反映原型系泊系统的一般固有特性。Δ形半潜式风机采用4根系泊缆的布置方式,Δ形半潜式风机的系泊刚度明显高于Y形半潜式风机的结果。此外,系泊系统具有一定的非线性特征,Δ形半潜式风机的系泊线性刚度区间小于Y形半潜式风机的结果。
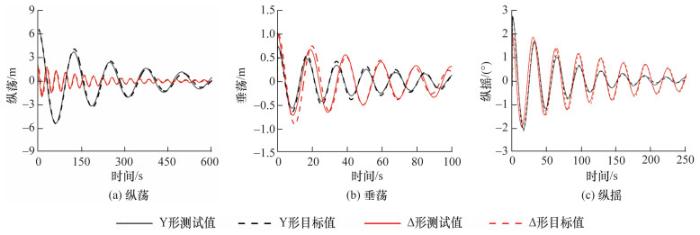
通过静水试验可以获得试验模型的自由衰减曲线,进而对半潜式风机的固有特性做出识别和评价。纵荡、垂荡和纵摇是半潜式风机的主要运动和关注重点,纵荡影响了系统部件的安全性,垂荡诱发了风电机组的垂向运动,对机组传动系统提出了考验,纵摇体现了系统的抗倾覆能力。Y形和Δ形半潜式风机纵荡、垂荡和纵摇衰减的测试值与目标值对比如图 12所示,自由衰减的测试值和目标值吻合较好,试验模型的设计制作、配重压载和气密性均较为理想,试验模型可对半潜式风机的质量、重心位置、转动惯量、阻尼特性和回复刚度等参数做出了较好表征。由图可见,由于系泊刚度的差异,Δ形半潜式风机的纵荡固有周期显著小于Y形半潜式风机的结果;而二者的纵摇固有周期相近。此外,Y形半潜式风机采用四立柱的形式,其垂荡自由度静水刚度较大,故垂荡固有周期小于Δ形半潜式风机。
4.4 试验可重复性校验
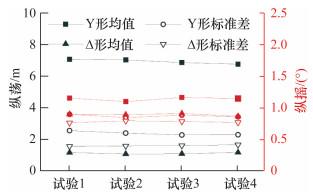
模型试验的可重复性校验是确保数据可靠性和结论科学性的关键环节。重复性校验能够有效排除随机干扰,确认试验方法的有效性。本研究以纵荡和纵摇的结果为例对比了LC2工况下的4次试验的运动均值和标准差,结果如图 13所示。由图可知,4次试验结果呈现出较好的一致性,说明本模型试验具有一定的准确性和可靠性。
4.5 平台运动对比
纵荡、垂荡和纵摇是半潜式风机的主要运动响应,也是半潜式风机动力特性的考察重点。该三自由度的运动响应可影响系统的动态载荷,过大的运动可能导致塔筒、输电缆、系泊缆和风电机组等结构失效或疲劳损伤。威胁半潜式风机服役安全。在工程实践中,需严格控制其幅值,确保半潜式风机的安全性和稳定性。
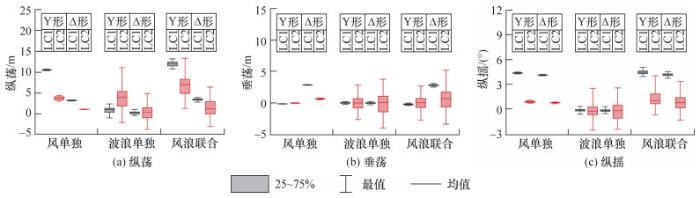
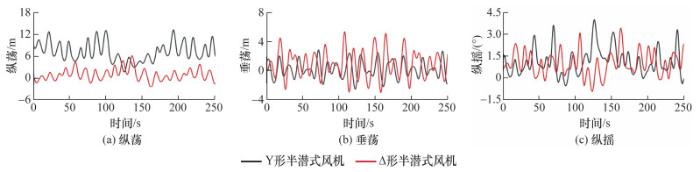
图 14给出了Y形和Δ形半潜式风机的纵荡、垂荡和纵摇的运动响应统计结果,并将LC2工况下的运动时程附于图 15。由图可知,半潜式风机服役于海洋环境,风场湍流度较低,风单独作用的均值与最值的差异较小。对于纵荡响应,Δ形半潜式风机的纵荡均值(平均风荷载和二阶波浪慢漂力作用)和幅值(一阶波浪力作用)均显著小于Y形半潜式风机的结果,这主要是由于2个半潜式风机的系泊刚度的显著差异。对于垂荡响应,半潜式风机的垂荡均值主要受风荷载影响,波浪二阶慢漂力作用效应极小;此外,Δ形半潜式风机的垂荡远大于Y形半潜式风机的结果,从而引起风电机组的大幅垂向运动。一方面,Y形半潜式平台采用四立柱布置,具有较大的水线面面积,静水刚度较大;另一方面,风机偏离Δ形半潜式平台重心布置,系统的纵摇加大了参考点(见图 1和图 2中的惯性坐标系原点,即塔筒轴线与平均水线面的交点)的垂向位移。对于纵摇响应,Δ形半潜式风机的纵摇略小于Y形半潜式风机的结果。这主要是由于Y形和Δ形半潜式风机的纵摇自由度的静水刚度相近,而Δ形半潜式风机的系泊纵摇刚度较大,且系泊系统的非线性特征更为显著,纵荡均值进一步加大了系泊刚度差异,进而抑制了Δ形半潜式风机的纵摇响应。
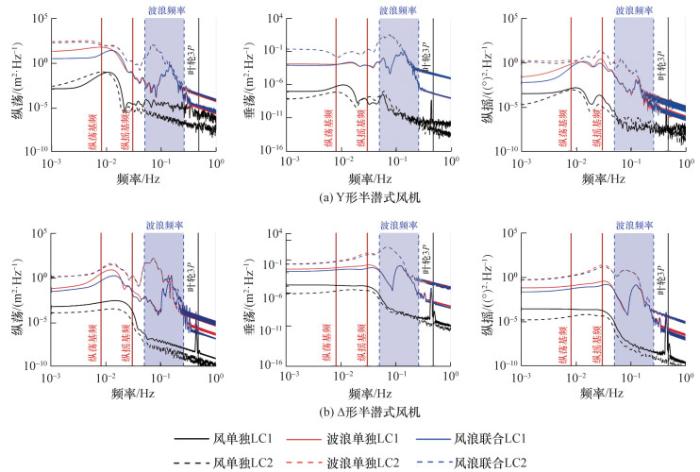
Y形和Δ形半潜式风机的运动响应的功率谱曲线如图 16所示。由图可见,2台半潜式风机的纵荡响应均在其基频附近出现十分明显的谱峰;需要注意的是,系泊刚度具有非线性,纵荡均值将导致系泊刚度增大,进而引起风单独作用和风浪联合作用下的纵荡基频有所增大。在波浪频率范围内,Δ形半潜式风机纵荡谱峰相对显著,这可能是由于Δ形半潜式风机纵荡固有周期相对较小,比较靠近波浪频率范围。此外,波浪单独作用的谱峰大于风浪联合作用的结果,这是由于风机叶轮气动阻尼效应削弱了运动响应。对于垂荡响应,Δ形半潜式风机的纵摇响应激发了参考点的垂荡响应,垂荡响应的功率谱在纵摇固有频率处也观察到明显的谱峰,纵摇运动可放大机组的垂向运动,这与图 14的分析结果相呼应。2台半潜式风机的垂荡响应谱峰主要集中在波浪频率范围内。此外,风机叶轮气动阻尼效应对垂荡的削弱效应十分轻微。纵摇响应方面,纵摇响应在其固有频率附近出现十分显著的谱峰;而在波浪频率范围内,谱峰相对较弱。此外,纵摇与纵荡之间具有强耦合性。波浪单独作用的谱峰大于风浪联合作用的结果,说明风机叶轮气动阻尼效应对纵摇具有一定削弱效应。
4.6 机组响应对比
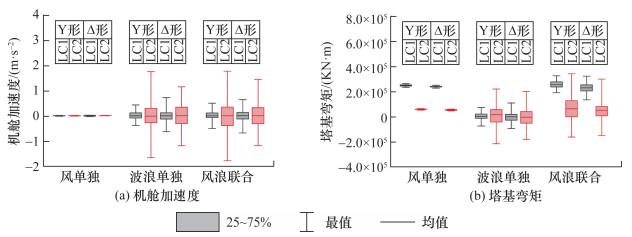
塔基弯矩是考察塔筒结构强度、安全性和疲劳寿命的重要指标,而机舱加速度直接关乎风机的发电效率和机舱传动系统可靠性。
半潜式风机的机组响应的箱线图如图 17所示。塔基荷载主要由叶轮推力、平台纵荡和纵摇诱发的风机惯性力以及纵摇引起的风机重力分量组成,而机舱加速度主要受纵荡和纵摇控制,显然二者具有强相关性。风场湍流度较低,风单独作用的塔基荷载和机舱加速度的时程分布区间较窄。波浪单独作用的塔基弯矩和机舱加速度的均值趋于0,波浪二阶慢漂力的影响甚微。如4.5节所述,较大的系泊刚度抑制了Δ形半潜式风机的纵荡和纵摇,进而导致Δ形半潜式风机的塔基弯矩均值略微偏小。对于波浪引起的时程变化幅度,LC1工况的Δ形半潜式风机的机舱加速度和塔基弯矩幅值大于Y形半潜式风机的结果;LC2工况的结果则相反。因此,机舱加速度和塔基弯矩对波浪周期较为敏感。需要注意的是,长期海况条件中小波浪周期占比较大,Δ形半潜式风机的研究和应用应注意长期机舱加速度和塔基弯矩的识别和考察,以保证结构安全。
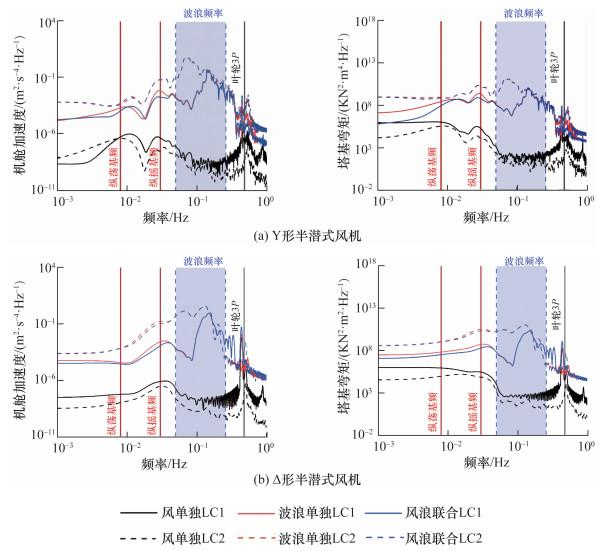
如图 18所示,塔基弯矩和机舱加速度的功率谱曲线具有一定的相似性,说明二者具有强相关性。塔基弯矩和机舱加速度的谱峰主要分布在波浪频率范围内;此外,纵摇固有频率也会对二者产生一定的激励作用,纵摇固有频率附近也观察到二者的谱峰,且机舱加速度的纵摇基频处谱峰相较于塔基弯矩偏小。显然,由纵摇角度引起的机组重力分量和惯性力一定程度上加大了塔基荷载的响应,而机舱加速度受纵摇的影响相对较弱。正如前文分析的,由于风机叶轮的气动阻尼效应,风浪联合的塔基弯矩和机舱加速度的功率谱谱峰略低于波浪单独作用的结果,特别地,由于气动阻尼效应削弱了纵摇响应,该现象在纵摇固有频率处的谱峰更为明显。
4.7 系泊导缆孔张力对比
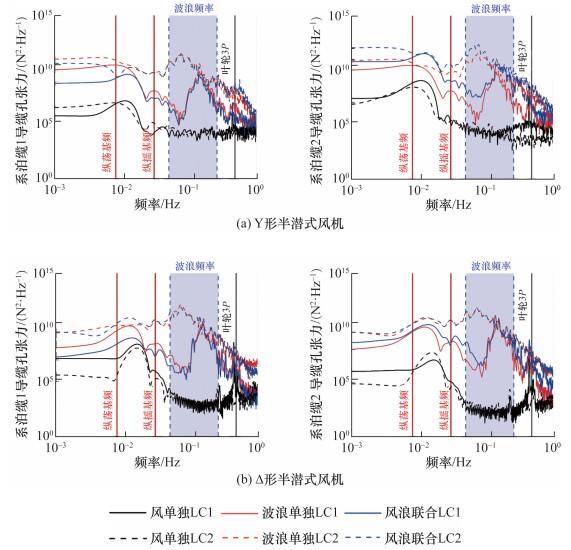
考虑到结构的对称性和风浪作用方向,Y形半潜式风机的系泊缆1和3(见图 1),Δ形半潜式风机的系泊缆1和4以及系泊缆2和3(见图 2)具有相似的动力响应。为简明,本节主要分析半潜式风机的系泊缆1和2的导缆孔张力,系泊导缆孔张力直接关乎其极限强度和疲劳强度。如图 19所示,在风荷载和二阶波浪慢漂力作用下,系统发生平均纵荡响应,导致系泊缆1处于松弛状态,其导缆孔张力均值小于平衡状态下的张力结果,而系泊缆2处于张紧状态,其导缆孔张力均值大于平衡状态下的张力结果。由于风场湍流度较低,风单独作用的系泊导缆孔张力的时程变化分布区间较窄,而波浪引起了系统纵荡的较大幅度时程变化,导致在波浪作用和风浪联合作用下的系泊导缆孔张力的时程变化分布区间较大。总体而言,在LC2风浪联合作用下,系泊缆2导缆孔张力最大,且Y形半潜式风机采用三系泊缆系统,其张力略大于采用四系泊缆的Δ形半潜式风机的结果。

Y形和Δ形半潜式风机的系泊缆1和2导缆孔张力功率谱曲线如图 20所示。由图可知,系泊导缆孔张力的谱峰主要集中在波浪频率范围内和纵荡基频处。4.5节和4.6节的分析结果表明,风浪联合工况的平台运动和机组响应由于叶轮气动阻尼效应的影响,其响应的谱峰低于波浪单独作用的结果;然而风浪联合工况的系泊缆2导缆孔张力谱峰值远大于波浪单独作用的结果,显然,存在其他因素放大了风浪联合工况的系泊缆2导缆孔张力谱峰值。
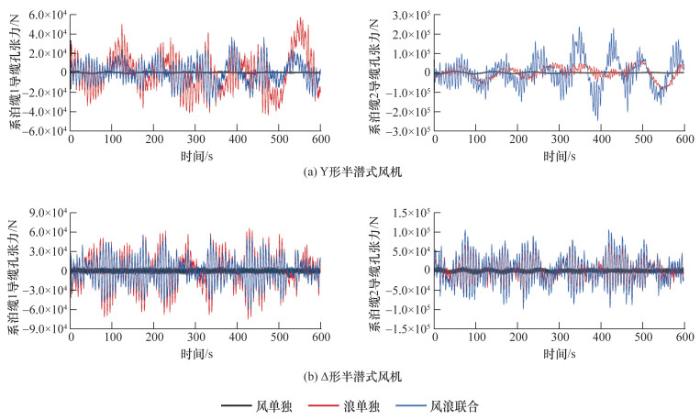
为了更直观地分析不同荷载条件下的系泊导缆孔张力动态特性,图 21给出了风单独、波浪单独和风浪联合作用下的系泊缆1和2的导缆孔张力时程,为了便于比较,将系泊导缆孔张力响应时程进行置零处理(扣除均值)。由图可知,风场湍流度较低,风单独作用下的系泊导缆孔张力的时程变化区间较窄。风浪联合作用下的系泊缆2的导缆孔张力的变化剧烈程度远大于波浪单独作用的结果,而风浪联合作用下的系泊缆1的导缆孔张力的变化剧烈程度小于波浪单独作用的结果。系泊缆是一个非线性的体系,半潜式风机在0°风浪荷载作用下的平衡位置向风场下游偏离,上游的系泊缆2处于张紧状态,存在非线性的位移-张力关系;而下游的系泊缆1处于松弛状态,未进入非线性区间。因此,风浪荷载使系泊缆2进入非线性状态,进而导致波浪引起的较小位移产生较大的导缆孔张力;而系泊缆1尚处于弹性阶段,叶轮的气动阻尼效应抑制了导缆孔张力响应。
5 结论
为了探寻风机中心布置的Y形和偏心布置的Δ形半潜式风机在不同海况条件下的动力特性差异,本研究在大气边界层风洞与浪槽联合实验室中再现了海上风浪环境,设计并制作了缩尺比为1∶70的试验模型,并采用全实物模型试验的方式测试风机、平台和系泊的固有特性与动力响应,通过典型工况试验及响应分析得到了如下结论:
1) 针对10 MW风机,通过半潜式风机的主尺寸优化,获得了尺寸参数(立柱尺寸、浮舱尺寸和系泊缆尺寸等)、排水量、质量、惯量和重心等参数相近的、具有方案可比性的Y形和Δ形半潜式风机设计方案。2种半潜式风机的纵摇固有周期相近;Y形半潜风机较大的竖向静水刚度使其的垂荡固有周期更小;而Δ形半潜式风机四线系泊方案的刚度大于Y形半潜式风机三线系泊,其纵荡固有周期更小。
2) 平台运动响应方面,风机偏心布置导致纵摇响应额外放大了机组的垂向运动,Δ形半潜式风机的垂荡响应显著大于Y形半潜式风机的结果,这对风电机组的结构安全不利。不同系泊方案导致的系泊刚度差异使得Δ形半潜式风机的纵荡响应显著小于Y形半潜式风机的结果,纵摇响应略小于Y形半潜式风机的结果。
3) 在极限自存工况的大波浪周期下,Y形半潜式风机的机舱加速度和塔基弯矩响应更大,但在额定作业工况的小波浪周期下则Δ形半潜式风机的结果更大。工程设计中需同时关注二者在承载力极限状态及疲劳极限状态中的差异。
4) 最大导缆孔张力出现在极限自存工况(轮毂高度处风速为50 m/s,有效波高为10.65 m,谱峰周期为14.13 s)的Y形半潜式风机的上游系泊导缆孔处,但超出Δ形半潜式风机的系泊导缆孔张力幅度有限。此外,风浪荷载引起的系统平衡位置变化使得风场上游系泊缆处于张紧状态,进入非线性刚度区间,导致风浪联合作用下的上游系泊导缆孔张力变化更为剧烈,谱峰值也显著增强。
本研究中的Δ形半潜式风机未考虑压载调平控制系统的作用效应,未来研究的重点方向之一可通过压载调平控制系统进一步抑制其相关动力响应,尤其是小波浪周期下的机舱加速度、塔基弯矩和机组垂向运动响应,从而提高半潜式风机的可靠性和安全性。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}